Manuel d'utilisation de l'application web de ROC
Introduction
La présente notice d'utilisation de l'application ROC-E / ROC-M décrit l'ensemble des fonctionnalités et leur fonctionnement.
Elle regroupe l'utilisation de l'application sur un robot ROC-E et celle sur un manager ROC-M.
Page d'accueil
Sur un robot ROC-E
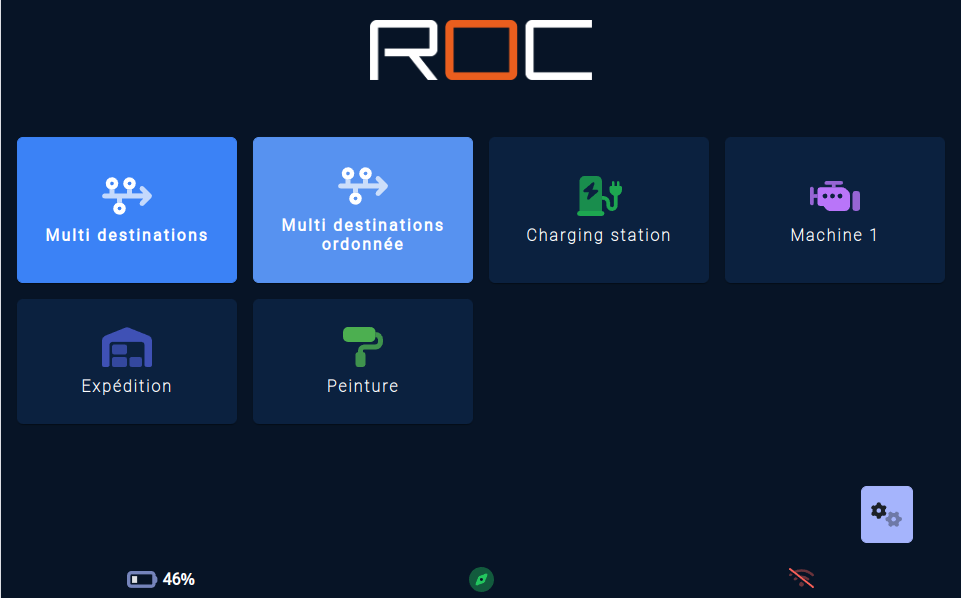
La page d'accueil présente sous forme de gros bouton la liste des destinations enregistrées dans la carte du robot.
Un appui sur l'un de ces boutons permet d'envoyer l'ordre au robot de se déplacer à la destination associée.
Le bouton en bas à droite permet d'accéder à la configuration de l'application.
Multi destinations
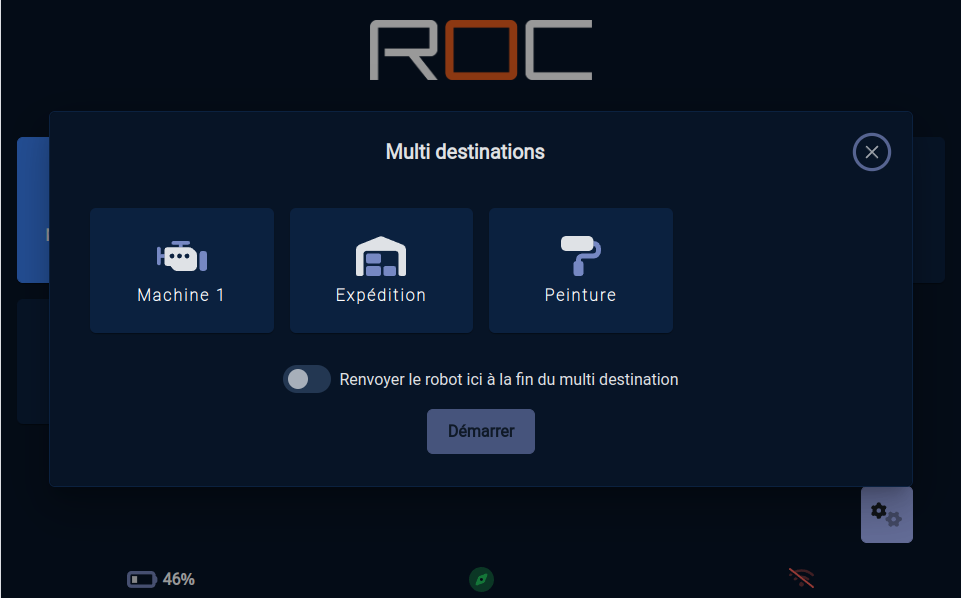
En cliquant sur le bouton Multi destinations, vous pouvez demander au robot de se déplacer à plusieurs positions dans la même mission en sélectionnant les destinations souhaitées.
Le robot se déplacera de destination en destination du plus proche au plus proche.
Une fois le robot à une destination, l'opérateur ne pourra que libérer le robot pour qu'il aille à sa prochaine étape (il ne pourra pas demander au robot d'aller à une autre destination).
Multi destinations ordonnée
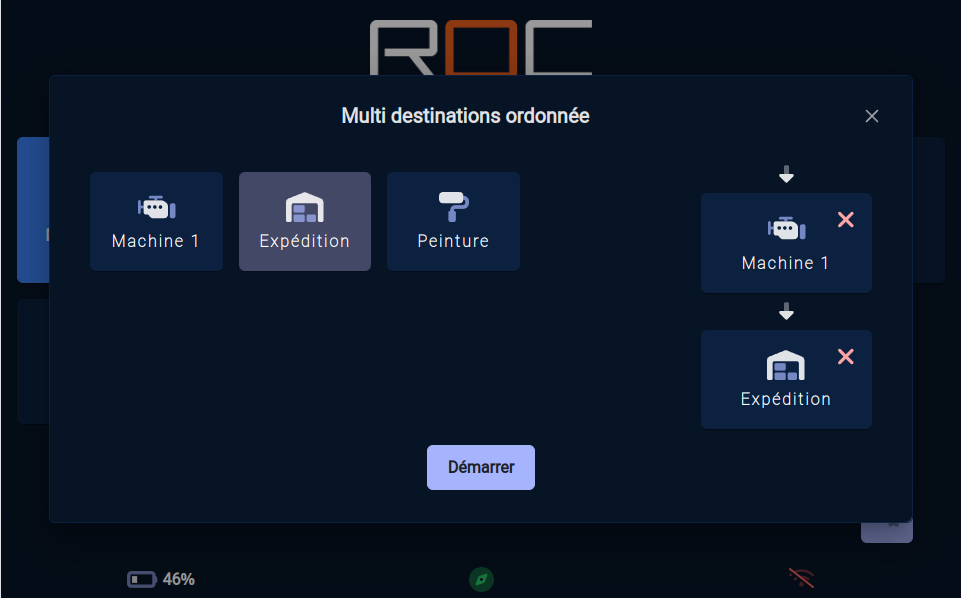
En cliquant sur le bouton Multi destinations ordonnée, vous pouvez demander au robot de se déplacer à plusieurs positions dans la même mission dasn un ordre fixe en sélectionnant les destinations souhaitées.
Le robot se déplacera de destination en destination dans l'ordre souhaité.
Une fois le robot à une destination, l'opérateur ne pourra que libérer le robot pour qu'il aille à sa prochaine étape (il ne pourra pas demander au robot d'aller à une autre destination).
Messages prédéfinis
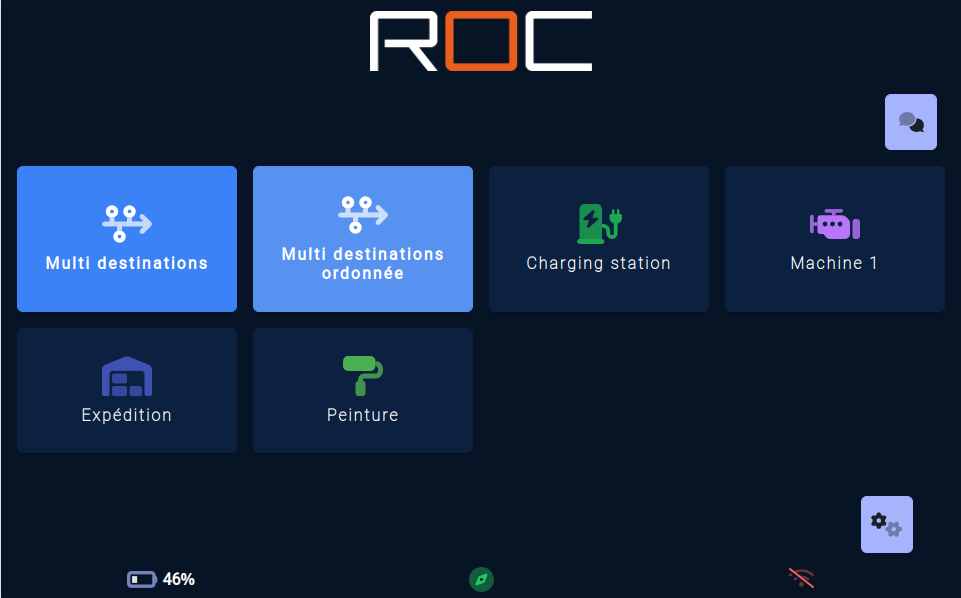
Si des messages prédéfinis ont été configurés, un bouton avec 2 bulles apparaît en haut à droite.
Ce bouton permet de sélectionner un message prédéfini à afficher une fois le robot à sa destination pour la mission en court.
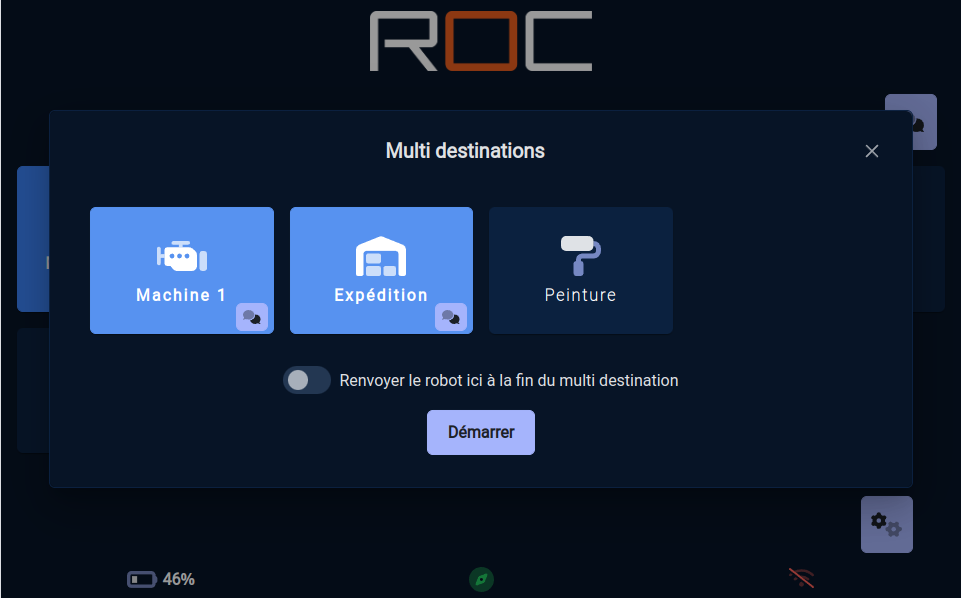
Dans le cas du multi destinations, le message peut être personnalisé pour chaque étape en cliquant sur le bouton associé à l'étape.
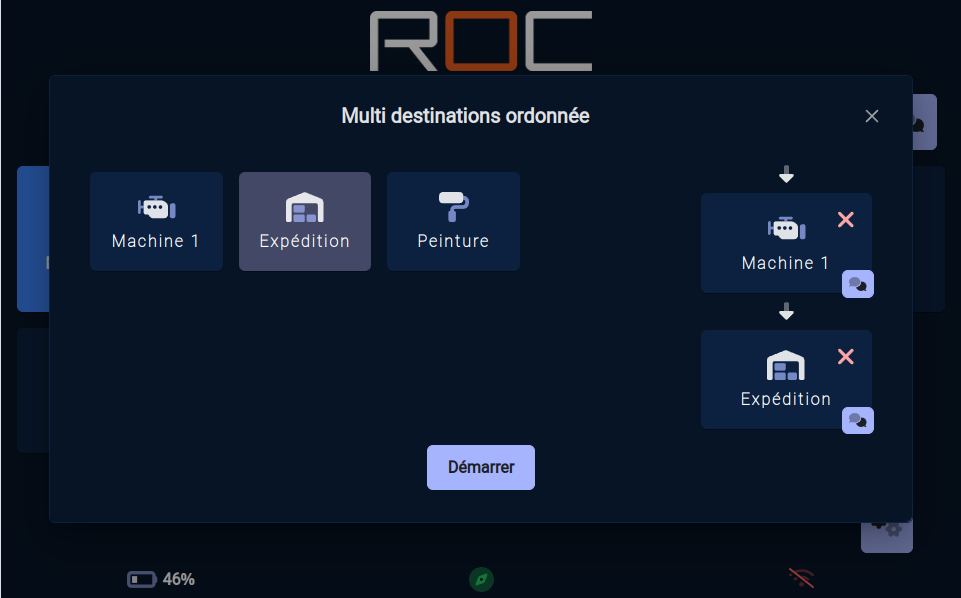
Dans le cas du multi destinations ordonnée, le message peut être personnalisé pour chaque étape en cliquant sur le bouton associé à l'étape.
Sur un manageur
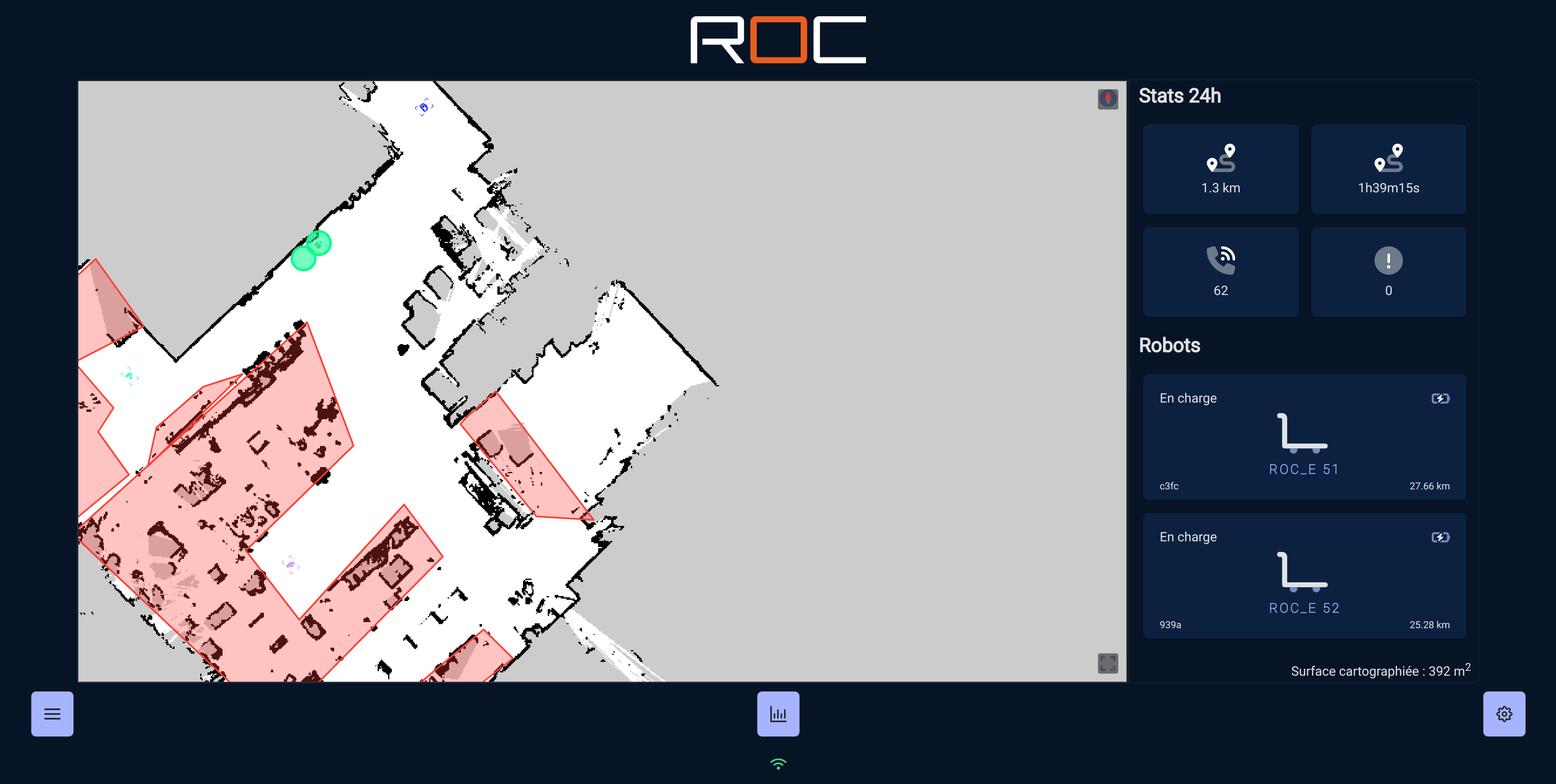
3 boutons en bas de l'écran permettent d'accéder à différentes sections :
Le bouton à gauche permet d'accéder à la liste des missions en cours.
Le bouton de droite permet d'accéder à la configuration de l'application.
Le bouton central permet d'accéder aux statistiques d'utilisations.
Configuration
La page de configuration permet comme son nom l'indique de configurer l'outil.
En fonction de la configuration (par exemple manager ou non), certaines options peuvent ne pas être disponibles.
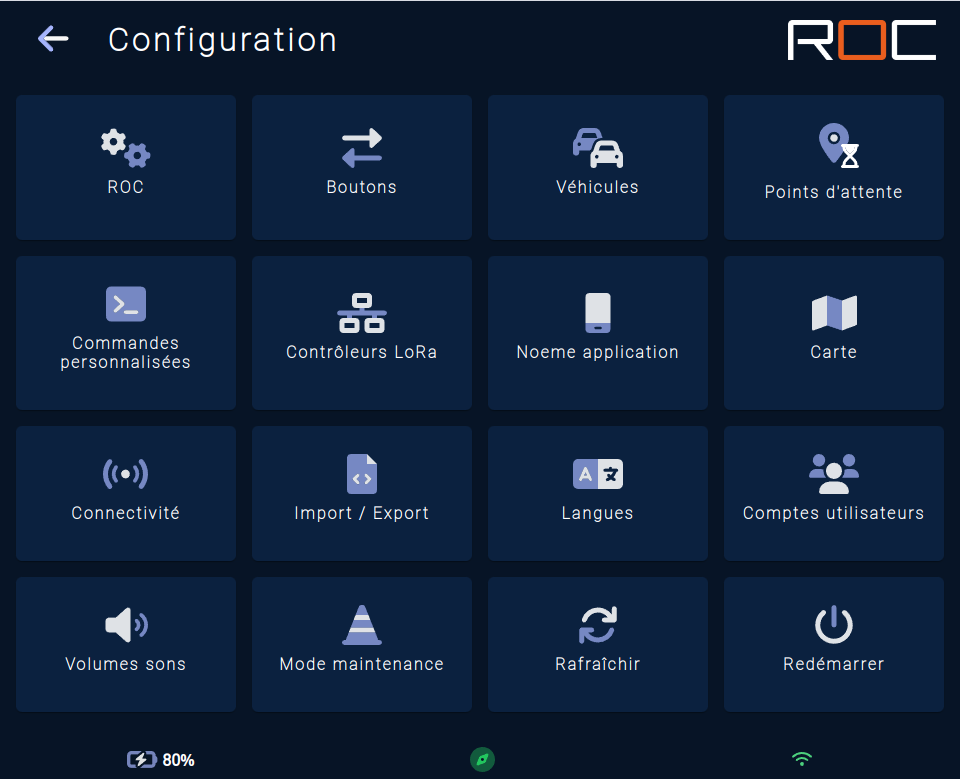
Cette page vous permet d'accéder aux sections suivantes :
ROC: pour la configuration générale du module.Boutons: pour ajouter / modifier / supprimer des boutons d'appel.Véhicules: pour gérer la liste des véhicules de la flotte.Points d'attente: pour ajouter / modifier / supprimer des points d'attentes.Commandes personnalisées: pour ajouter / modifier / supprimer des commandes personnalisées.Contrôleurs LoRa: pour ajouter / modifier / supprimer des contrôleurs LoRa.Messages prédéfinis: pour ajouter / modifier / supprimer des messages prédéfinis.Noeme application: pour accéder à l'application de Noeme.Carte: pour gérer les destinations.Ascenseur: pour intéragir avec l'ascenseur du module ROC-P (visible seulement si le module est configuré, cf. Véhicule - Dimensions).Connectivité: pour gérer les différentes connexions WiFi de ROC et Noeme.Sélectionner une carte: pour gérer la carte active.Import / Export: pour exporter / importer les configurations.Langues: pour sélectionner la langue de l'interface.Comptes utilisateurs: pour ajouter / modifier / supprimer un compte utilisateur.Volumes sons: pour configurer les différents volumes sonores.Mode maintenance: pour activer ou désactiver le mode maintenance (uniquement pour le manager).Rafraîchir: pour mettre à jour la page (peut-être utile lors de la mise à jour de l'application).Redémarrer: pour redémarrer l'application ROC.
ROC
Cette page de configuration vous permet d'accéder à certaines informations (version de l'application, ROC Id…) et de configurer les différents paramètres de l'application.
Général
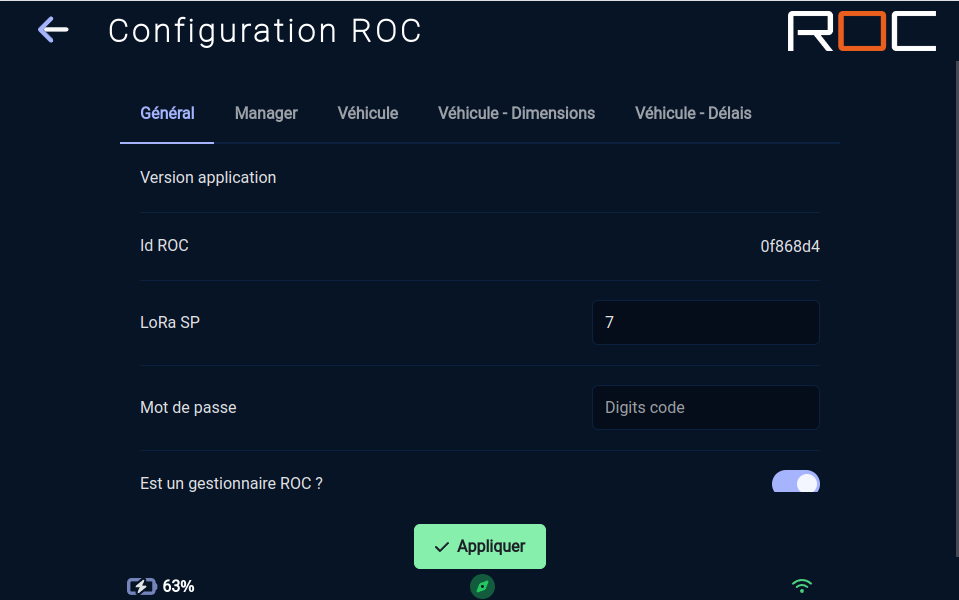
Cette page vous permet de consulter / modifier les paramètres suivant :
Version application: version de l'application installée.Id ROC: identifiant unique du module.LoRa SP: configuration du spread factor de la communication LoRa ; doit être le même que les boutons d'appels, le manager et les autres robots.Valeur possible de 7 à 12.
Plus la valeur est élevée, plus la communication sera lente mais la portée étendue.Mot de passe: mot de passe pour accéder à la partie configuration.Est un gestionnaire ROC ?: indiquer si l'équipement actif est le manager ou non.Est un véhicule ROC ?: indiquer si l'équipement actif est connecté à un véhicule Noeme.Clavier virtuel: utilisation ou non du clavier virtuel.
Manager
Cette page vous permet de consulter / modifier les paramètres suivant :
Si le manager est aussi véhicule :
Délai de réponse: délai d'attente pour recevoir les réponses des équipements.
Si le manager n'est pas aussi véhicule :
Délai de réponse par défaut: délai d'attente par défaut pour recevoir les réponses des boutons d'appel et contrôleur LoRa.Délai de réponse des véhicules: délai d'attente pour recevoir les réponses des véhicules d'appel.Autoriser plusieurs missions pour le même bouton: autoriser la création de plusieurs missions pour le même bouton à partir des API ou du Modbus.
Véhicule
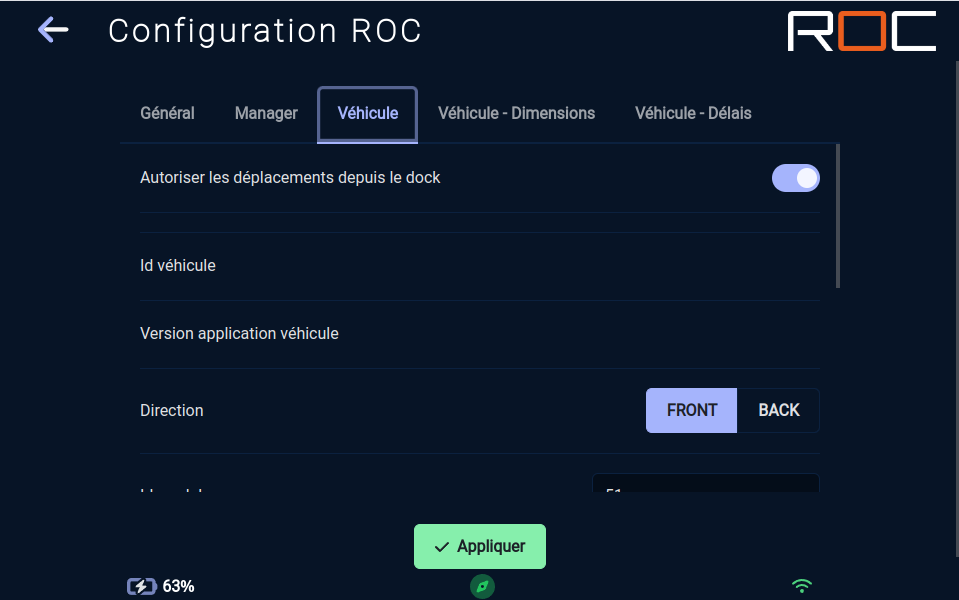
Cette page vous permet de consulter / modifier les paramètres suivant :
Autoriser les déplacements depuis le dock: autoriser à un utilisateur de démarrer une nouvelle mission quand le robot est en attente à sa station de charge.Id véhicule: identifiant unique du véhicule.Position du mât: pour indiquer la position du mât sur le robot; indiquerAvantsi le mât se trouve du côté des feux blanc du véhicule,Arrièresinon.Direction sur la station de charge: pour indiquer dans quel sens le véhicule doit se connecter à la station de charge; indiquerAvantpour que le véhicule se connecte du côté des feux blanc du véhicule,Arrièresinon.Id LoRa module: identifiant LoRa du module pour la communication. Doit être unique et reporté sur la manager.Mettre l'écran en veille: Mettre l'écran en veille quand le robot entre en veille.Autoriser le mode suiveur: Autoriser le mode suiveur quand le robot est à l'arrêt.Utilisation de haut parleur externe: Utilisation de haut parleur externe pour les sons de ROC-E et de Noeme.Son par défaut quand le robot est en attente: Sélectionner le son par défault que le robot est en attente sur une position.Nb tentative en cas d'échec du déplacement à la première étape: nombre de tentative de déplacement en cas d'échec du déplacement à la première étape.Nb tentative en cas d'échec du déplacement aux autres étapes: nombre de tentative de déplacement en cas d'échec du déplacement aux autres étapes.Nb tentative en cas d'échec du déplacement en multidest: nombre de tentative de déplacement en cas d'échec du déplacement lors d'un multidestination.Veh vers destination, tolérance de distance à l'arrivée: distance en cm autour de la destination où le robot est considéré comme arrivé.Veh vers destination, tolérance angulaire à l'arrivée: angle en degré par rapport à la destination où le robot est considéré comme arrivé.
Véhicule - Dimensions
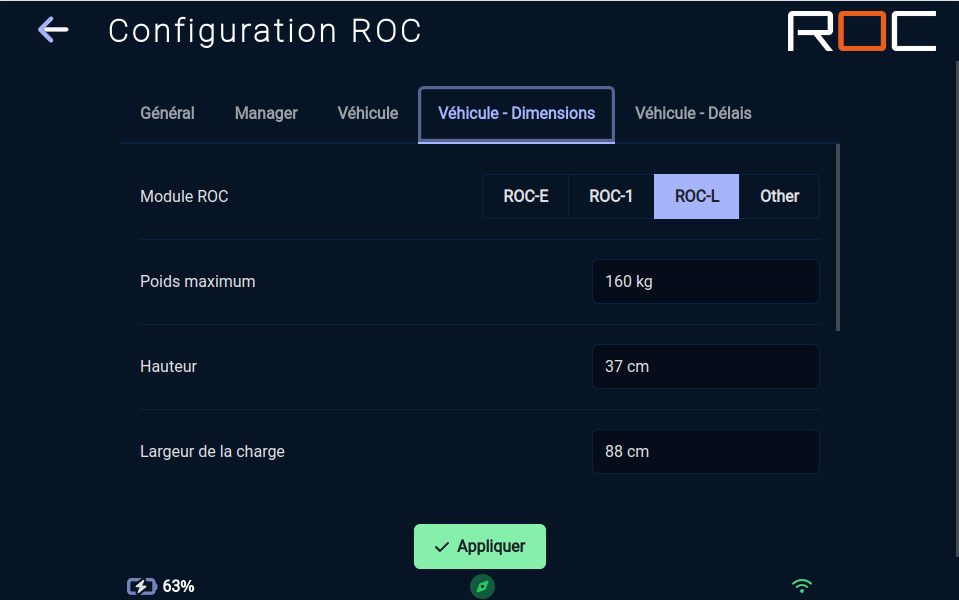
Cette page vous permet de consulter / modifier les paramètres suivant :
Module ROC: type de module ROC actif.Poids maximum: poids maximum di robot avec sa charge.Hauteur: hauteur totale du robot.
Si le module est de type ROC-EP ou ROC-P
Largeur de la charge: largeur de la charge transportée.Profondeur de la charge: Profondeur de la charge transportée.Hauteur avec la charge: hauteur totale du robot avec sa charge.Vitesse maximale avec la charge: vitesse maximale du robot autorisé quand il transporte la charge.
Si le module est de type Other
Largeur maximale: largeur maximale du robot.Profondeur maximale: Profondeur maximale du robot.
Véhicule - Délais

Cette page vous permet de consulter / modifier les délais suivant :
Délai d'auto-libération: délai de libération automatique lors de l'arrivée à la première étape (robot sans charge).Délai d'auto-libération multidestination: délai de libération automatique lors de l'arrivée aux autres étapes (robot potentiellement chargé).Délai entre 2 sons lors de l'attente de libération: délai d'attente entre 2 sons pour indiquer l'attente de libération.Délai entre 2 tentatives en cas d'échec du déplacement: délai d'attente entre 2 tentatives en cas d'échec du déplacement.Délai avant un nouvel essai sur une position d'attente: délais d'attente avant un nouvel essai quand le robot est sur une position d'attente.Délai avant mise en veille: délais d'attente une fois que le robot est en charge et avant qu'il ne passe en veille.Délai entre 2 tentatives en cas de pause: délai d'attente avant de reprendre automatiquement un déplacement en pause.Ascenseur - Délai de poursuite de la montée après le contact: l'ascenseur va continuer de monter après avoir détecté le contact pendant le délai défini. Utilisé pour l'amarrage aux étagères, ce paramètre n'est visible que pour les tops de type ROC-P ou ROC-EP.
Certains délais peuvent être activés / désactivés à l'aide d'un switch.
Quand le délai est désactivé, la fonctionnalité est désactivée, par exemple : si le switch pour le délai avant mise en veille est désactivé, le véhicule ne se mettra jamais en veille.
Boutons

Cette page liste les boutons configurés.
Pour ajouter un nouveau bouton, cliquez sur le bouton “Ajouter un bouton".
Pour modifier un nouveau bouton, sur le crayon associé au bouton.
Pour supprimer un bouton, cliquez sur la croix rouge associée au bouton.
Ajout d'un bouton
Pour ajouter une nouvelle configuration de bouton, cliquer sur le bouton “Ajouter un bouton”.
Si l'application est configurée en manager et véhicule, un mode automatique vous sera proposé, donc les autres cas, le mode manuel sera affiché.
Suivez les étapes pour créer un nouveau bouton.
Type de bouton

L'application gère actuellement 5 types de boutons :
Bouton d'appel: Lors de l'appui sur le bouton associé, le robot se déplacera jusqu'à la destination associée. Une fois sur place, l'utilisateur pour choisir la prochaine étape ou libérer le robot.Bouton réappro: Lors de l'appui sur le bouton associé, le robot se déplacera jusqu'à la première destination associée. Une fois sur place, l'utilisateur ne pourra que libérer le robot, et celui-ci partira à la deuxième destination associée. Ce type de configuration peut-être utile dans le cas d'un réapprovisionnement d'un poste de travail, l'appel est lancé depuis le poste de travail, le robot part dans un premier temps au magasin où il sera chargé puis dans un deuxième temps au poste de travail de l'utilisateur.Bouton multidestination: Lors de l'appui sur le bouton associé, le robot se déplacera à toutes les destinations associées de plus proche en plus proche.Bouton multidestination et retour: Lors de l'appui sur le bouton associé, le robot se déplacera à toutes les destinations associées de plus proche en plus proche et terminera par une dernière position spécifique configurée.Bouton multidestination ordonnée: Lors de l'appui sur le bouton associé, le robot se déplacera à toutes les destinations associées dans l'ordre défini.
Un bouton peut être déclaré "virtuel" ; dans ce cas, il ne sera jamais interrogé par la manager et ne pourra être "appelé" qu'à travers le protocole modbus ou les APIs.
Contraintes
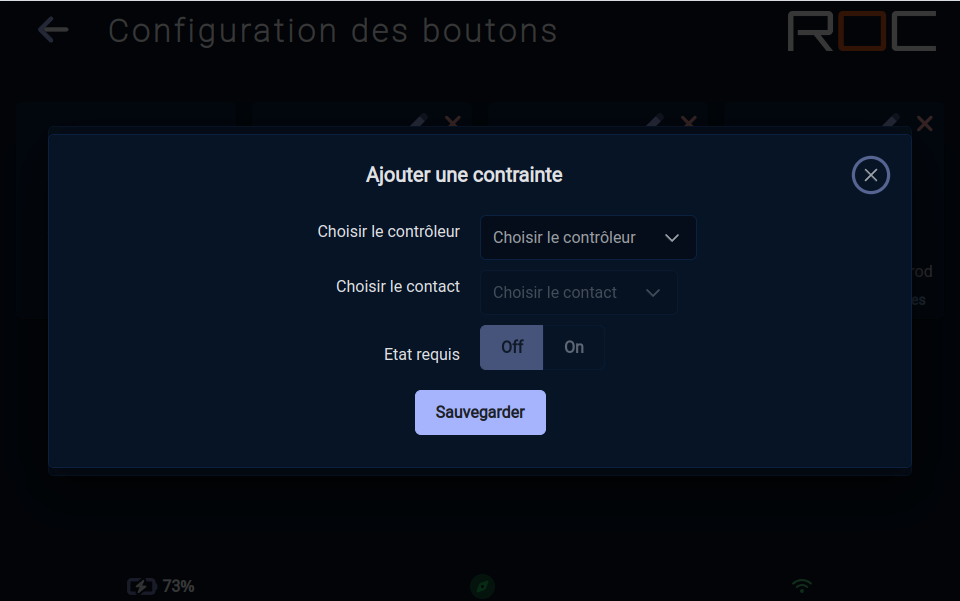
Pour chacune des étapes, vous pouvez configurer des contraintes. Pour cela, il vous suffit de cliquer sur le cadenas lié à l'étape.
Ces contraintes sont liées aux contrôleurs LoRa connectés à la solution (cf section Contrôleurs LoRa) ;
Pour définir une contrainte, vous devez indiquer :
le contrôleur LoRa où est connecté le capteur qui définira la contrainte
le contact du contrôleur LoRa
l'état du contact attendu pour valider l'étape
Type de module

Une fois un bouton créé, vous pouvez limiter l'appel de ces boutons à certains type de module ROC ; pour cela, cliquer sur le lien “Tous les modules” au niveau du bouton puis sélectionnez le ou les modules autorisés à répondre à un appel de ce bouton.
Véhicules
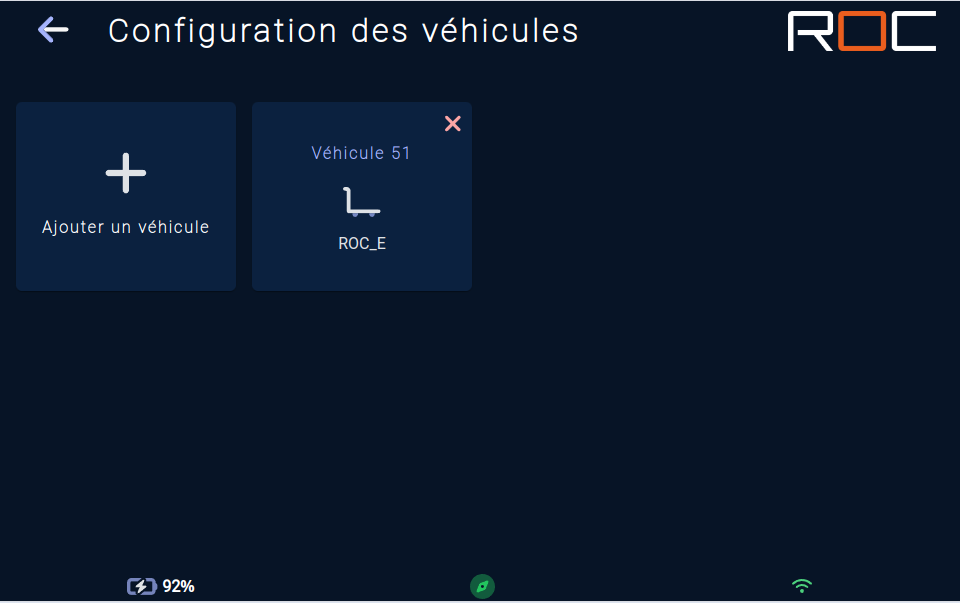
Cette page liste les véhicules configurés.
Pour supprimer un véhicule, cliquez sur la croix rouge associée au véhicule.
Pour ajouter un nouveau véhicule, cliquez sur le bouton “Ajouter un véhicule” et compléter les informations demandées.
Points d'attente

Dans certains cas, plusieurs robots auront besoin d'aller à la même position sauvegardée en même temps.
Pour éviter que les robots s'auto bloquent, il est possible de configurer des points d'attente pour que l'un des robots se mette en attente sur la position en attendant que l'autre robot ait quitté la position sauvegardée.
Pré-requis
Pour ajouter un nouveau point d'attente, vous devez avoir crée au préalable :
La position sauvegardéeoù il peux y avoir conflit.La position sauvegardée correspondant au
point d'attente.Une zone paramétrablequi doit contenir la position sauvegardée où il peux y avoir conflit. Le robot enverra un message aux autres robots pour indiquer que la place est libre quand il quittera cette zone.
Commandes personnalisées
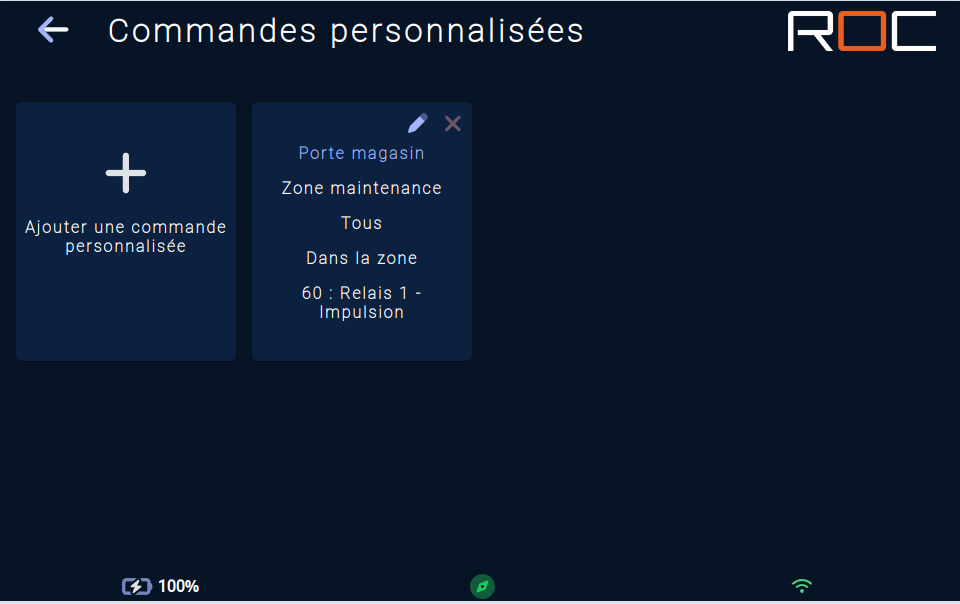
Il est possible de créer des commandes personnalisées pour demander à un contrôleur LoRa d'activer un de ses relais à un moment particulier ou pour mettre en pause le déplacement du robot en fonction de l'état d'un contact du contrôleur LoRa.
Pour ajouter une commande personnalisée, vous devez indiquer :
un
titrela
zone de déclenchement(créez une zone paramétrable sur la carte dans un premier temps)la
liste des positions sauvegardéespour lesquelles l'ordre doit être envoyé (ne rien sélectionner pour appliquer à toutes les destinations, activer le "Toutes sauf" pour ne choisir que les positions dans lequel le comportement ne doit pas se déclencher)le
moment déclencheur(en entrant dans la zone, en sortant de la zone, sur une erreur de déplacement, tant que le robot est dans la zone)le
relais du contrôleur LoRaà activer ou le contact à attendre
Exemples d'utilisation : ouvrir une porte automatique, couper un système d'alarme d'une zone, attendre qu'une porte soit ouverte pour continuer...
Contrôleurs LoRa

Cette section de permet de rajouter, modifier et supprimer des contrôleur LoRa pour ensuite être utilisé dans les autres configurations.
Lorsqu'un contact du contrôleur est actif, la pastille sera verte.
Lors de la modification d'un contrôleur LoRa, il est possible de récupérer à distance la configuration des contacts du contrôleur. Une fois cette configuration récupérée, vous pouvez modifier la configuration d'un contact à distance.
Messages prédéfinis
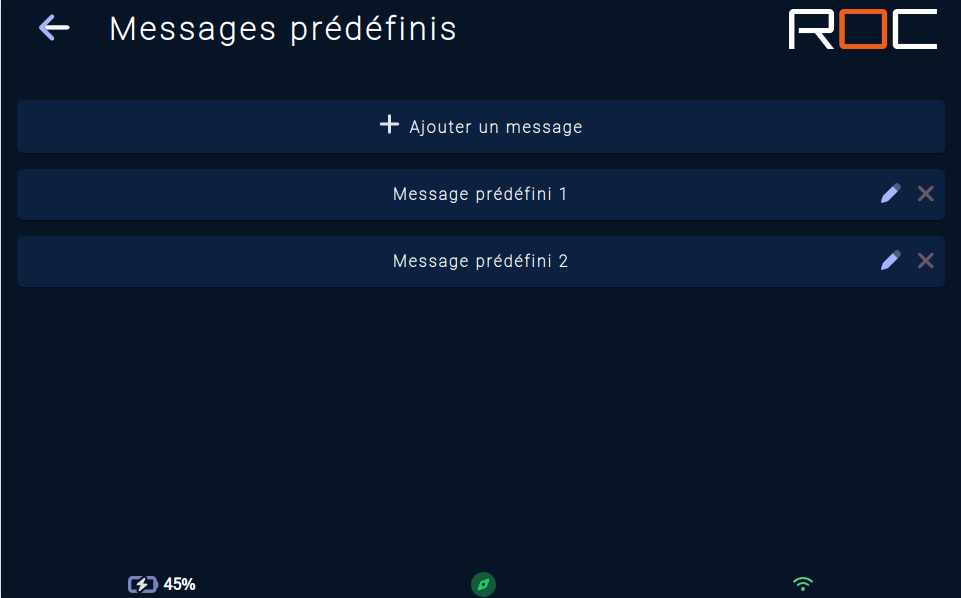
Cette section de permet de rajouter, modifier et supprimer des messages prédéfinis pour ensuite être utilisé lors des déplacements du robot.
Noeme application
Ce menu vous permet d'accéder directement à l'application du véhicule.
Se référer à la documentation de l'application de Noeme pour plus de détails.
Carte
Cette section vous permet:
d'ajouter, déplacer, supprimer des positions sauvegardées.
d'ajouter, supprimer des positions dockées.
d'ajouter, supprimer des positions d'étagère.
de modifier les noms, icônes et couleurs des positions sauvegardées, stations de recharge et positions dockées.
de configurer le pilotage d'un relais d'un contrôleur LoRa quand le robot est sur la position.
de limiter l'accès aux positions à certain type de module.
de gérer les groupes.
Ajouter une position
Pour ajouter une position sur la carte, cliquez sur le bouton "+".
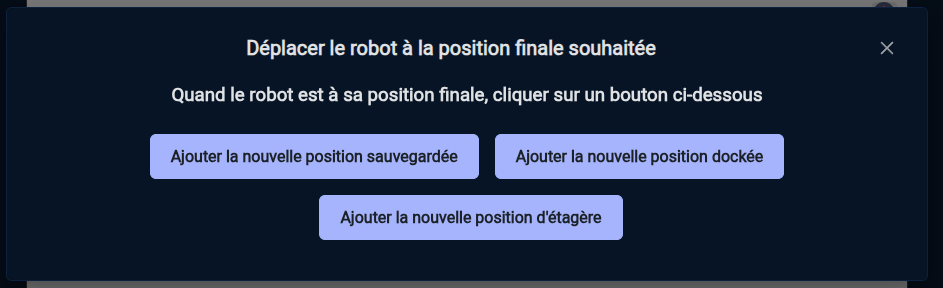
Suivant la présence du module ROC-P ou non, vous pouvez créer 3 types de position :
une position sauvegardée
une position dockée
une position d'étagère
Position sauvegardée
Ce type de position correspond à une position classique ; le robot ira à cette position avec une marge autorisée de plusieurs centimètres
Position dockée
Ce type de position correspond à une position précise ; le robot ira à cette position avec une marge autorisée de moins d'un centimètre.
Ce type de position nécessite la présence d'un marqueur pour que le robot puisse se positionner précisément.
Dans le cas du ROC-P, ce type de position est requis pour les stations de picking ou les positions de dépose d'étagère.
Position d'étagère
Dans le cas du ROC-P, vous devez créer ce type de position à la position où vous souhaitez qu'une étagère soit prise.
Modifier une position
En fonction du type de position, plusieurs options peuvent être modifiées.
Quel que soit le type, vous pouvez modifier les options suivantes :
Couleur: couleur de l'icône.Icône: icône associée à la position.Nom: nom de la position.Activer un relais sur la position: cette option vous permet d'activer un relais sur un contrôleur LoRa quand le robot se trouve sur cette position.
Pour activer un relais, sélectionnez :le contrôleur.
le relais 1 ou 2.
L'action sur le relais (On/Off - pour activer le relais quand le robot est présent, Pulse pour envoyer une impulsion sur le relais à l'arrivée du robot).
Position dockée
Dans le cas du ROC-P, vous pouvez indiquer le type de station présent à cette position :
Aucune: aucune station présente, utiliser cette configuration pour la dépose d'étagère.Chargement: pour les stations gravitaires de chargement.Déchargement: pour les stations gravitaires de déchargement.Picking: pour les stations de picking.
Dans le cas des stations, vous pouvez indiquer la présence ou non de détection de caisse en complétant la partie contact.
Vous devez indiquer les dimensions des charges qui seront prises sur ces stations ainsi que la hauteur à laquelle l'ascenseur doit être levé pour prendre la charge.
Position d'étagère
Dans le cas du ROC-P et d'une position d'étagère, vous devez indiquer les dimensions de l'étagère qui sera prise sur cette position ainsi que la hauteur à laquelle l'ascenseur doit être levé pour prendre la charge (hauteur maximale, l'ascenseur stoppera automatiquement quand il détectera le contact).
Position dockée ou d'étagère
Un ensemble de paramètres avancés vous permet de configurer l'approche du robot sur ces positions :
Distance de dédockage: distance que doit faire le robot pour sortir de cette position.Distance d'approche: distance à laquelle le robot se positionne avant de démarrer la phase de docking.Distance de désactivation des sécurités: distance à laquelle le robot désactive ses sécurités pour permettre de s'approcher des obstacles sur la position finale.Distance guidée: distance durant laquelle le robot ne peut plus tourner avant la position finale.Vitesse maximale: vitesse maximale autorisée pendant la phase de docking.Contact autorisé: autorise ou non le robot à toucher et forcer sur un obstacle.Tolérance de succès au contact: tolérance en mm pour considérer la position du robot par rapport à la position finale comme un succèsSeuil ampérage moteurs: seuil d'ampérage maximal des moteurs autorisé pendant la phase de docking.Durée seuil ampérage moteurs: durée maximale autorisée pour franchir le seuil d'ampérage maximal.
Groupes
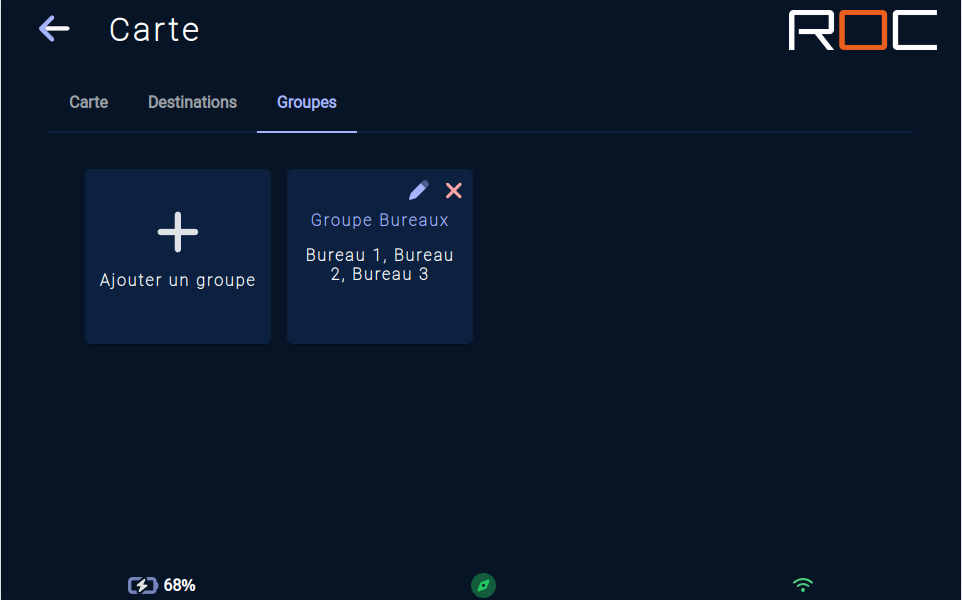
Vous avez la possibilité de créer des groupes de positions. Un groupe est constitué d'une position principale et de plusieurs positions secondaires.
Lorsqu'une mission est configurée pour se déplacer à une position principale d'un groupe, l'écran affichera automatiquement la liste des positions secondaires quand le robot sera arrivé à cette destination. L'utilisateur pourra alors demander au robot de se déplacer à l'une des positions secondaires pour "terminer" le trajet.
Au niveau de la page d'accueil, les positions secondaires des groupes seront masquées et une icône "+" sera ajoutée sur les positions principales des groupes. En cliquant sur ce "+", vous pourrez alors accéder à la liste des positions secondaires du groupe.
Ascenseur

Cette section vous permet d'interagir avec l'ascenseur du module ROC-P.
Le bouton du haut vous permet de monter l'ascenseur au maximum.
Le deuxième bouton vous permet de monter l'ascenseur tant que le bouton est maintenu pressé.
L'avant-dernier bouton vous permet de descendre l'ascenseur tant que le bouton est maintenu pressé.
Le bouton du bas vous permet de descendre l'ascenseur au maximum.
Quand l'ascenseur est en déplacement, le bouton rouge vous permet de stopper son déplacement.
Le bouton avec la roue crantée vous permet de configurer la hauteur du haut de l'ascenseur par rapport au sol. Pour modifier la configuration, cliquez sur le bouton et indiquez dans le champ de saisie la hauteur réelle du haut de l'ascenseur avec le sol. Cette configuration permet au véhicule de vérifier la présence ou non d'un obstacle avant de déposer sa charge.
Connectivité
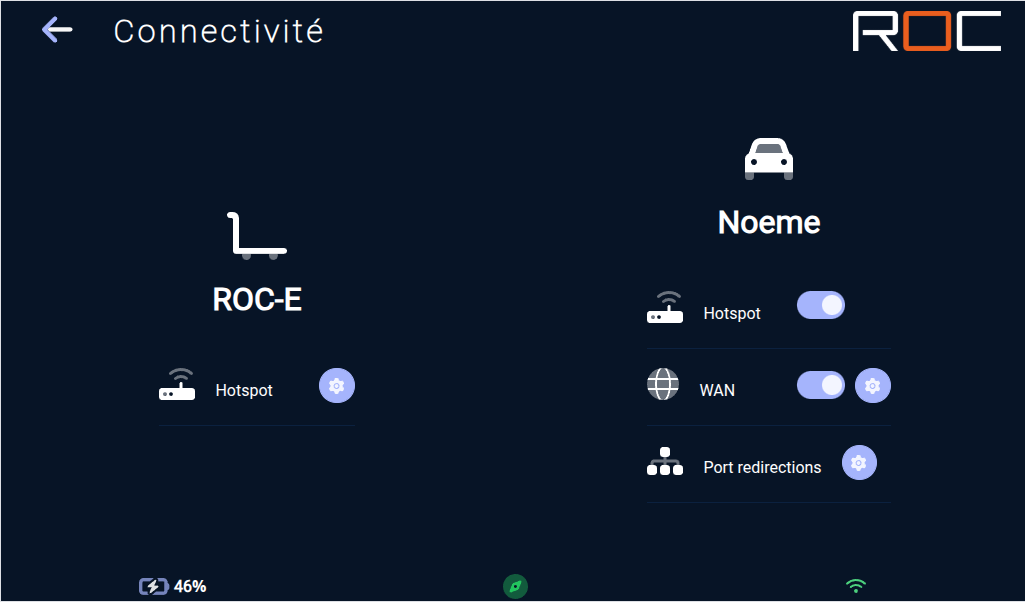
Cette page vous permet d'activer, de désactiver et de configurer les différentes fonctionnalités WiFi pour le module et Noeme.
Cette page permet également, pour les véhicules, d'accéder à la configuration des redirections de port.
Redirections de port
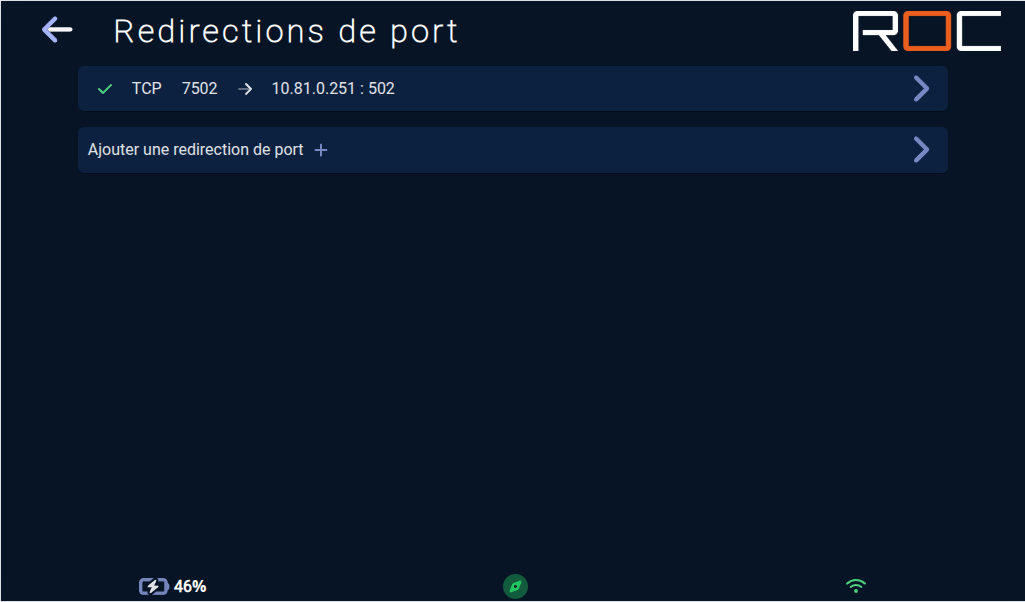
Cette page vous permet d'activer, de désactiver et de configurer les redirections de port du véhicule vers d'autres équipements.
Dans le cas où vous connectez un équipement sur le réseau cablé du véhicule et que celui-ci est connecté à votre réseau Wifi, les redirections de port vous permettent d'accéder à votre équipement à travers votre réseau Wifi et une redirection de port configurée sur le robot.
Sélectionner une carte
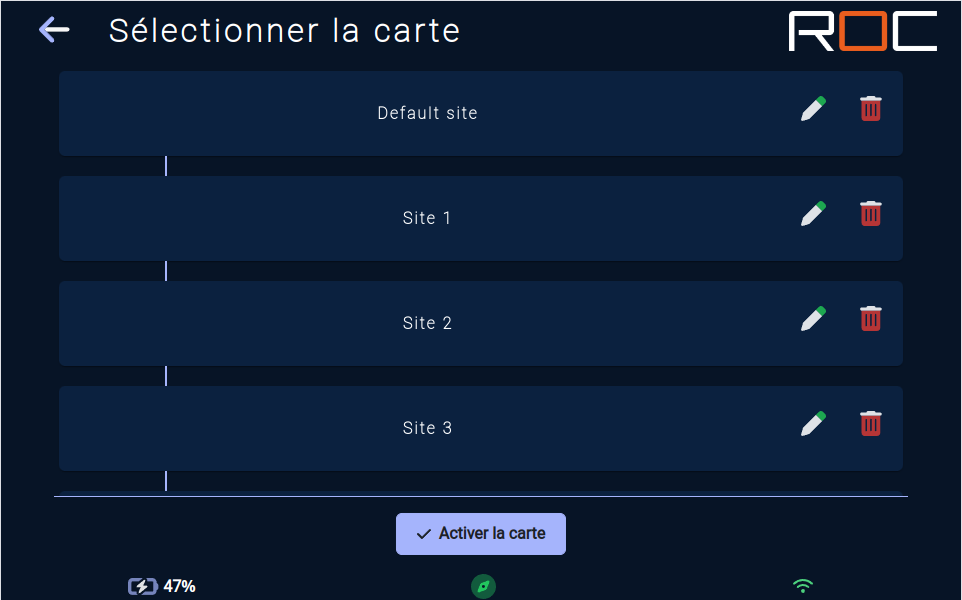
Cette page permet de changer la carte active 🗺️ du véhicule parmi les cartes créées ou importées sur le véhicule.
Elle permet aussi de renommer et supprimer les sites, ainsi que de supprimer les cartes.
Sur cet affichage en "arbre", les sites (contenant les cartes) sont visibles sur la gauche de l'arbre, les cartes, leurs noms et leurs aperçus sont situés sous le site parent.
Le bouton crayon ✏️ permet de modifier le nom et la description d'un site. Le bouton poubelle 🗑️ de supprimer, une confirmation sera demandée.
Il est impossible de supprimer le site actif ou la carte active.
Une fois la sélection terminée, le bouton en bas de page permet de lancer le changement de carte.
Le véhicule commencera par remplacer sa carte active puis il effectuera une relocalisation pour démarrer la navigation autonome sur sa nouvelle carte.
Import / Export
Cette page vous permet d'importer / exporter les configurations.
Exporter : cliquez sur le bouton "Export" pour télécharger les configurations (pour les sauvegarder ou pour les importer sur un autre robot ou manager).
Importer : cliquez sur le bouton “Import” puis sélectionnez le fichier à importer.
Langues

Cette page vous permet de choisir la langue de l'application.
Comptes utilisateurs

Cette page vous permet d'ajouter, de modifier ou de supprimer un compte utilisateur.
Volumes sons
Cette page vous permet de paramétrer un volume maximum pour chaque scenario de sons émis par le véhicule.
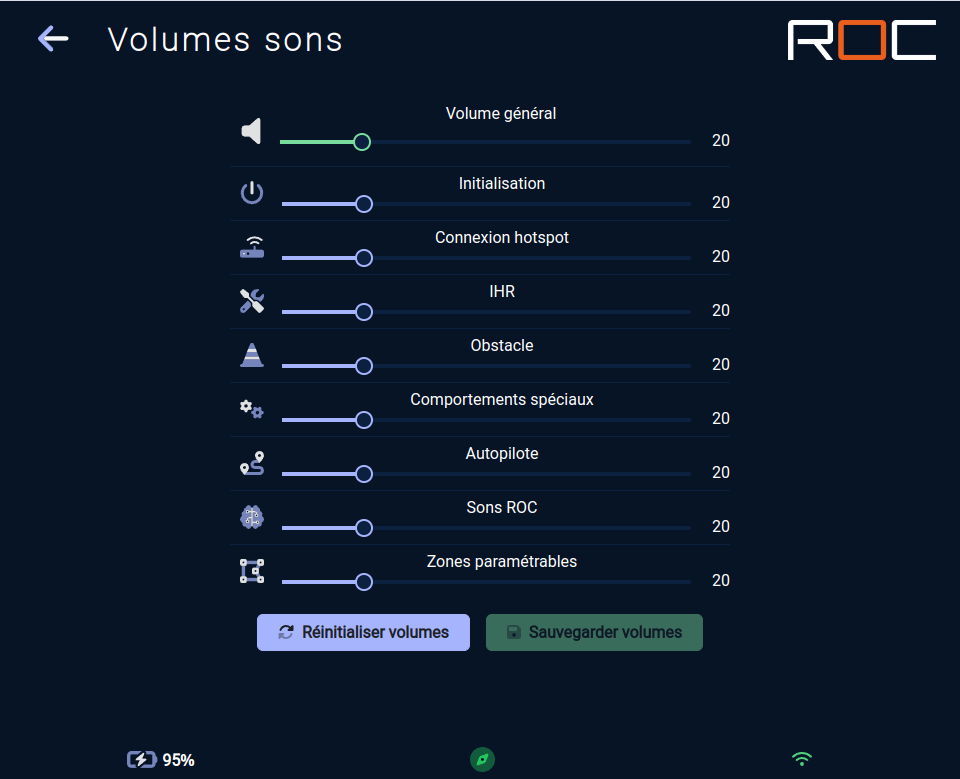
Le volume général agit comme une limite haute pour toutes les autres valeurs.
S'il est configuré à 30, les autres volumes ne pourront pas excéder 30.
Les scénarios paramétrables sont les suivants :
Initialisation: Sons émis au démarrage du véhicule.Connexion hotspot: Sons émis à la connexion d'un appareil au hotspot WiFi du véhicule.IHR: Sons émis quand le véhicule est en attente d'une intervention humaine (Intervention Humaine Requise).Obstacle: Sons émis quand le véhicule détecte un obstacle lors d'un déplacement.Comportements spéciaux: Sons émis lors d'un état particulier du véhicule.Autopilote: Sons émis lors des étapes de sons d'une séquence du mode autopilote du véhicule.Sons ROC: Sons émis lors des missions.Zones paramétrables: Sons émis lorsque le véhicule rentre, sort ou se trouve dans une zone paramétrable dans laquelle des - comportements sonores ont été configurés.Sécurité désactivée: Sons émis quand les sécurités sont désactivées lors du docking.
Mode maintenance
Cliquez sur ce bouton pour activer ou désactiver le mode maintenance.
Ce bouton n'est visible que sur un manager et permet de mettre en pause le système.
Si le mode maintenance est activé, l'icône du bouton sera orange.
Rafraîchir
Cliquez sur ce bouton pour force un rafraîchissement complet de la page.
Cette action peut-être utile après une mise à jour de l'application.
Redémarrer
Cliquez sur ce bouton pour redémarrer complètement l'application et la réinitialiser dans son été de démarrage.
Statistiques
La page de statistiques vous permet d'accéder à un ensemble de graphique et heatmap sur le fonctionnement de la solution.
Le bouton Export vous permet d'exporter les données brutes de l'application pour générer vos propres statistiques d'utilisation.
Accueil
Permet d'avoir une visualisation générale de l'utilisation de la solution.
Un système de filtre vous permet de choisir la date et la période des données analysées.
Appels
Permet de consulter un ensemble de graphique sur les appels effectués sur la solution.
Appels par bouton
Permet de consulter le nombre d'appel par bouton.
Destinations
Permet de consulter des statistiques sur les destinations les plus demandées ainsi qu'une heatmap.
Délais
Permet de consulter des statistiques sur les délais d'interventions sur la solution :
Temps de trajet
Délai d'assistance en cas de problème
Délai de libération
Erreur de déplacement
Permet de consulter des statistiques sur les erreurs de déplacement ainsi qu'une heatmap pour voir où les problèmes se produisent.
IHR
Permet de consulter des statistiques sur les erreurs IHR (Intervention humaine requise) ainsi qu'une heatmap pour voir où les problèmes se produisent.
Missions
La page "missions" n'est disponible que sur les manageurs.
Elle permet de consulter la liste des missions en cours et de créer de nouvelles missions
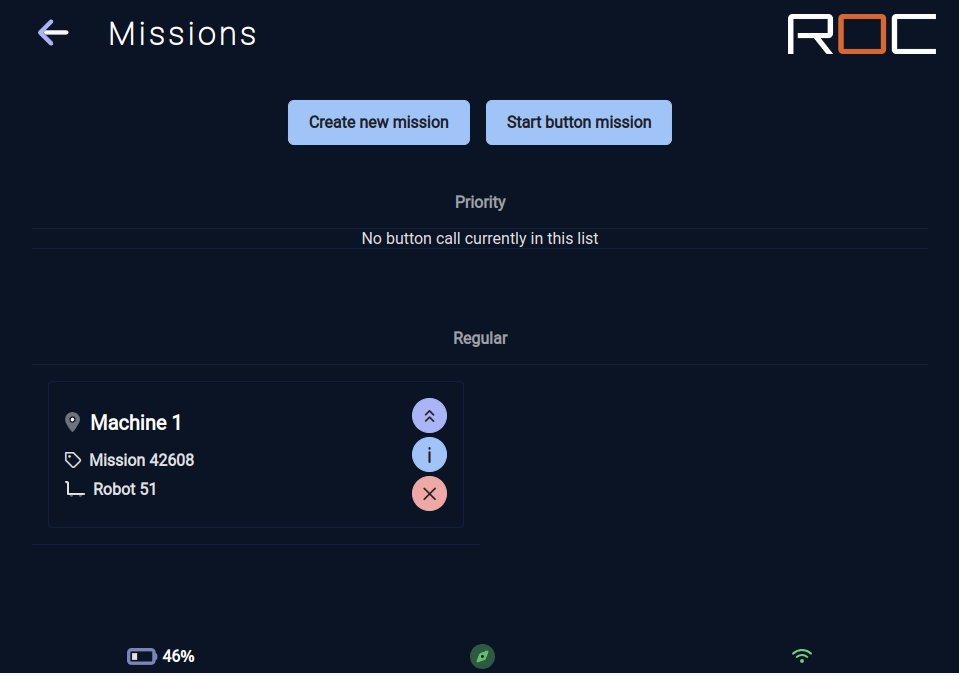
Création d'une nouvelle mission
Créer une nouvelle mission
En cliquant sur le bouton "Créer une nouvelle mission", vous pouvez créer une nouvelle mission sur mesure à envoyer aux robots.
Etape 1 : choisir entre une mission multidestination ou une mission multidestination ordonnée.
Etape 2 : choisir les destinations.
Etape 3 : choisir le ou les types de modules autorisés pour cette mission (si vous ne sélectionnez aucun module, ils seront tous autorisés).
Etape 4 : choisir un ou plusieurs robots autorisés pour cette mission (si vous ne sélectionnez aucun robot, ils seront tous autorisés, si vous ne sélectionnez qu'un seul robot, la mission lui sera directement assigné).
Démarrer une mission de bouton
En cliquant sur le bouton "Démarrer une mission de bouton", vous pouvez créer une nouvelle mission à envoyer aux robots à partir des boutons pré configuré. Le fonctionnement sera le même que si vous appuyer sur un bouton LoRa.
Etape 1 : choisir le bouton préconfiguré.
Etape 2 : choisir un ou plusieurs robots autorisés pour cette mission (si vous ne sélectionnez aucun robot, ils seront tous autorisés, si vous ne sélectionnez qu'un seul robot, la mission lui sera directement assigné).
Listes de missions
La première liste présente les missions prioritaires.
La seconde, les missions non prioritaires (par défaut)
Une mission non prioritaire passera prioritaire si un premier robot n'arrive pas à exécuter la mission (dès qu'un autre robot sera disponible, il prendra en priorité cette mission).
Mission
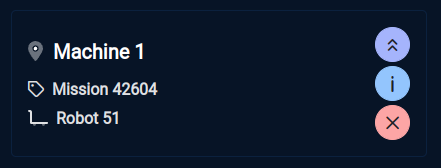
Les informations de base sont indiquées :
L'étape active de la mission avec sa destination.
Le numéro de la mission ou le bouton associé.
Le robot affecté à la mission.
3 boutons d'intéraction sont disponibles :
Passer la mission prioritaire.
Afficher les détails de la mission.
Annuler la mission.
Détails de la mission

Cette popup vous permet de consulter les détails de la mission avec toutes ses étapes.
Libérer un robot
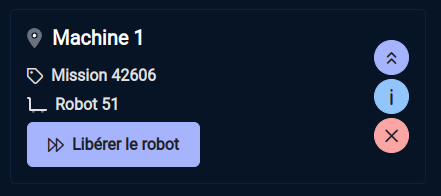
Quand un robot est en attente de libération, le bouton "Libérer le robot" apparaît.
Ce bouton vous permet de libérer le robot pour qu'il parte à sa prochaine étape ou retourne se mettre en charge si sa mission est terminée.
Etendre une mission
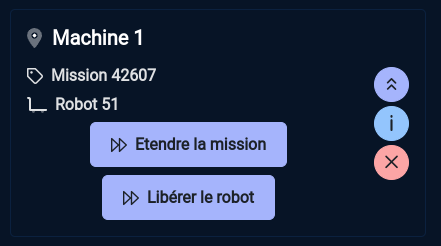
Quand un robot est en attente de libération et a terminé sa mission, le bouton "Etendre la mission" apparaît.
Ce bouton vous permet d'indiquer au robot les prochaines étapes de sa mission.
Le robot sera automatiquement libéré lorsqu'il reçoit ces nouvelles étapes.