Carte
Cette page permet de configurer la carte active du véhicule et modifier son comportement de déplacement, d'évitement etc...
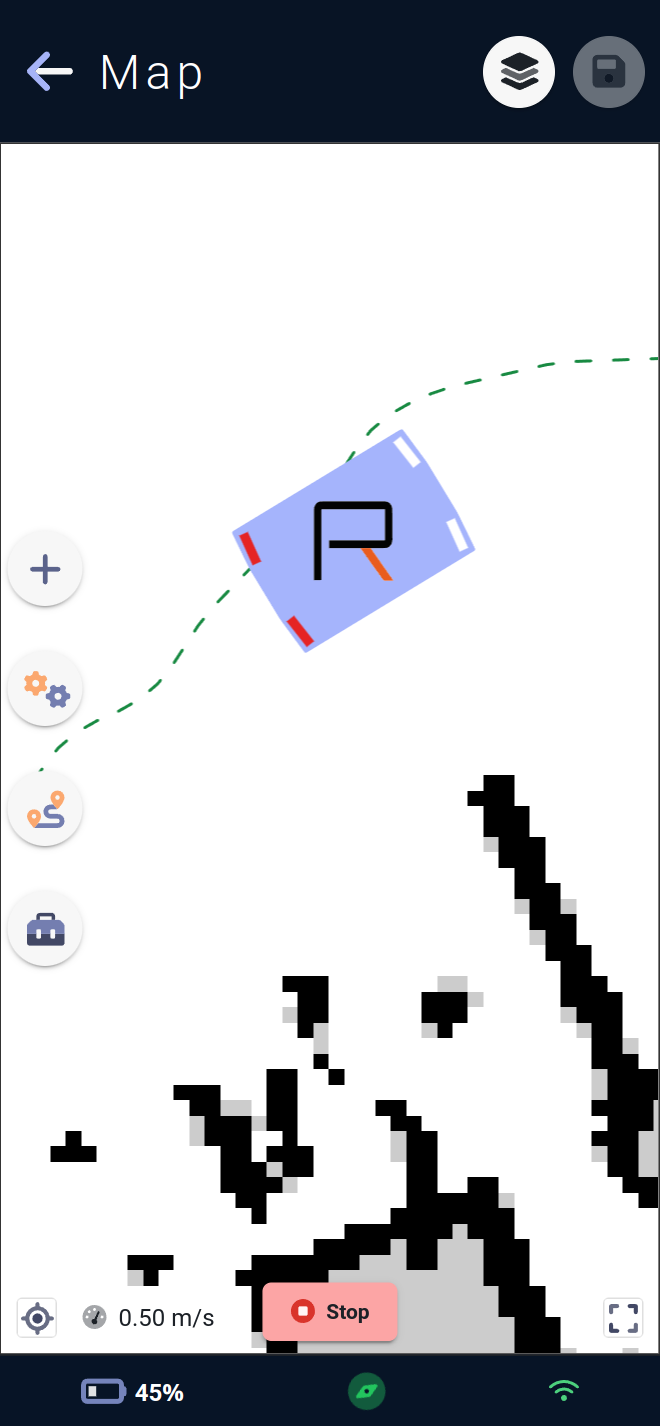
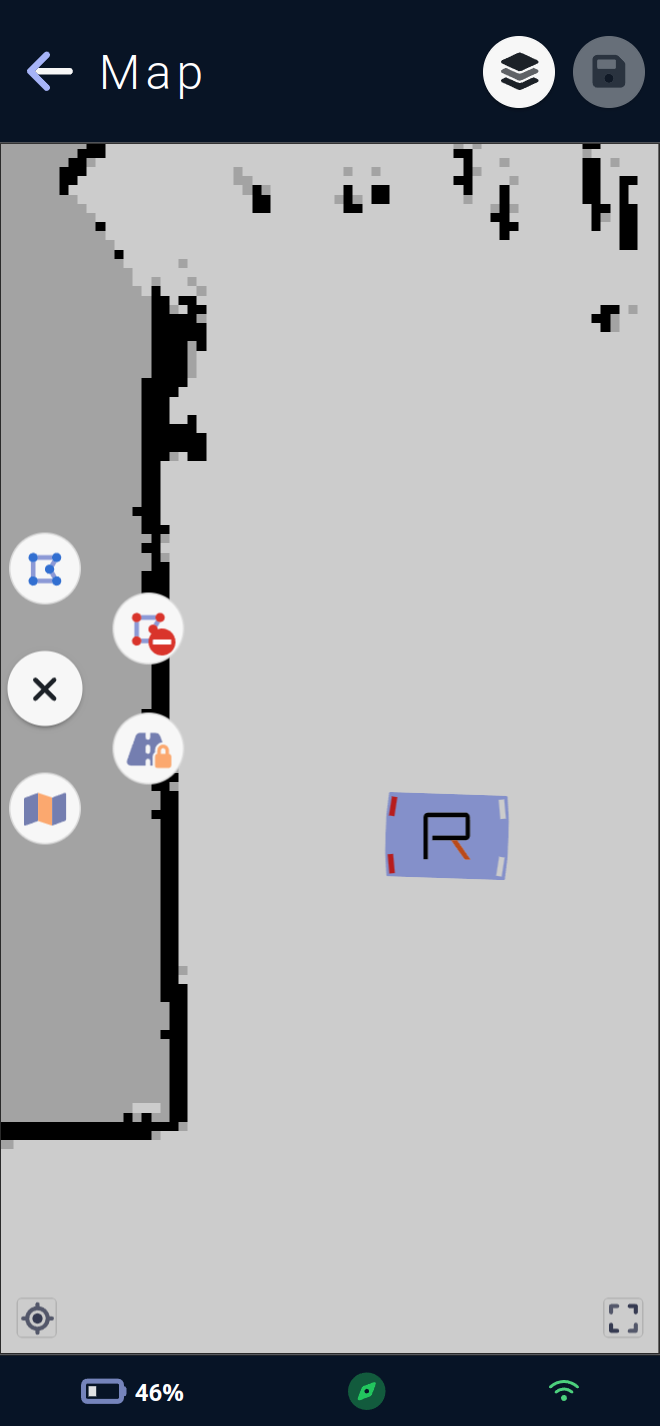
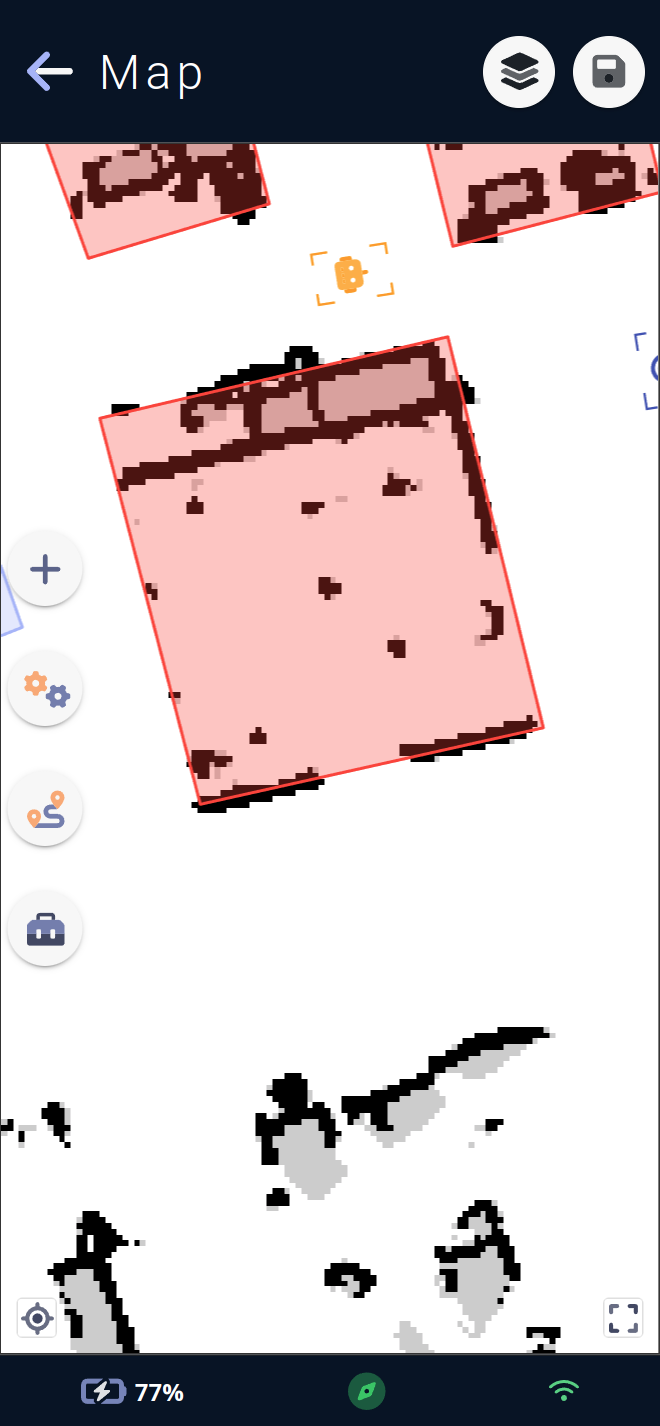
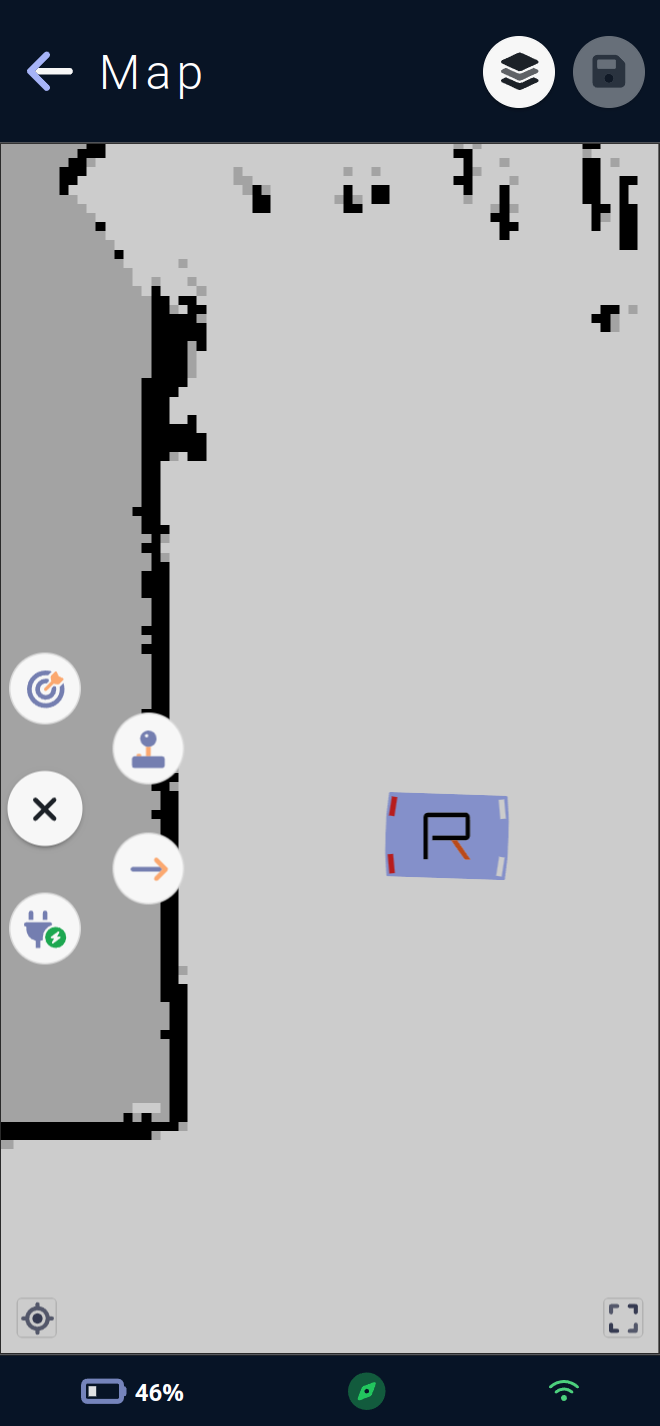
La carte active est visible en arrière-plan sur la page, la surface blanche représentant la surface praticable par le véhicule et les surfaces noires représentant les obstacles détectés lors de l'étape de cartographie (cf. ## Création nouvelle carte). Les surfaces en gris sont inconnues (souvent derrière un mur ou obstacle, le véhicule n'a pas pu déterminer ce qu'il y avait derrière).
La vitesse courante du véhicule est indiquée en bas à gauche de la carte. Pour une meilleure visibilité, la bulle d'information de la vitesse n'est pas affichée si le véhicule est à l'arrêt.
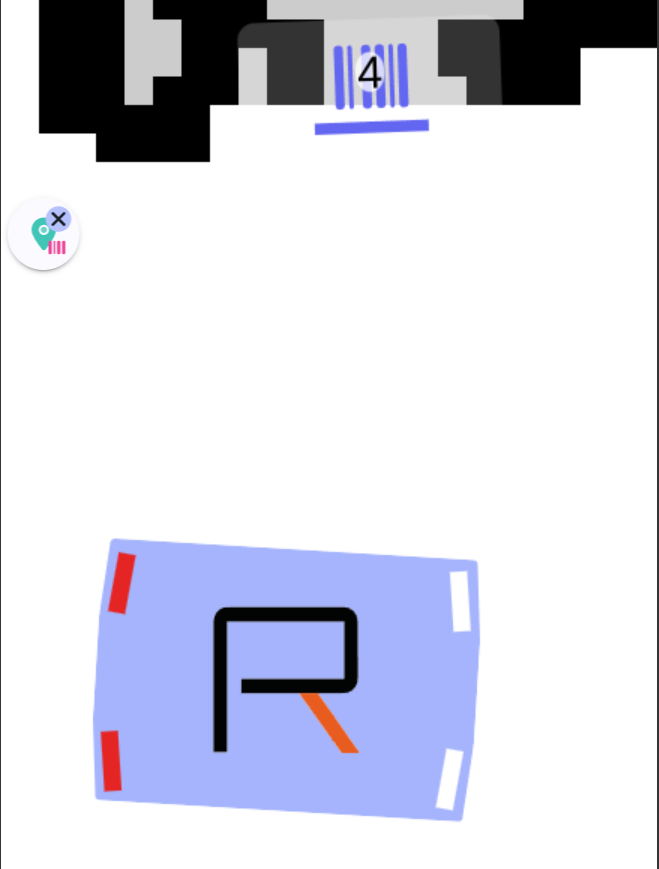
Le véhicule est représenté sur sa carte par un rectangle bleu, arborant le logo Rob'Occ à l'intérieur, et des petites barres blanches et rouges simulant des phares de voitures pour indiquer l'orientation actuelle du véhicule. Les barres blanches indiquent l'avant et les rouges, l'arrière.
Le chemin de navigation est affiché en vert et en mouvement dans le cas où le véhicule effectue une mission de déplacement. Ce chemin est théorique, le véhicule peut selon l'environnement ou la configuration plus ou moins le suivre.
Le bouton de sauvegarde de la carte est situé en haut à droite, il passera en vert si des modifications de la carte n'ont pas encore été sauvegardées sur le véhicule. Il n'est pas possible de sauvegarder la carte quand le véhicule effectue une mission de déplacement.
Le menu calques est également situé en haut à droite à coté du bouton de sauvegarde, il permet d'afficher ou cacher certains calques ou éléments de la carte ainsi que de sélectionner un élément de la carte.
Quatre autres menus d'actions sur la carte sont disponibles au centre à gauche de la carte:
Le menu d'ajout de points d'intérêts (station de charge, positions sauvegardées et dockées).
Le menu de configuration permet d'ajouter des zones interdites et personnalisées, configurer le comportement global du véhicule sur la carte et configurer des routes de circulations.
Le menu de déplacement permet au véhicule d'effectuer des déplacements : segments tout droit, à sa station de charge, en cliquant sur la carte ou d'ouvrir un joystick virtuel pour le téléopérer.
Le menu boite à outils renferme des outils avancés de l'édition de carte comme la gomme, mais aussi des outils pour la localisation du véhicule pour le localiser manuellement dans la carte ou lui demander d'effectuer une
relocalisationautomatique.
En outre, les éléments dessinés sur la carte sont sélectionnables lorsque la sélection est active, et un menu correspondant aux actions disponibles (suppression, édition, translation etc.) sur cet élément apparaît autour du centre de l'élément.
Un popup de confirmation sera affiché si la page est quittée alors que des modifications n'ont pas été sauvegardées.
Menus
Menu Ajout
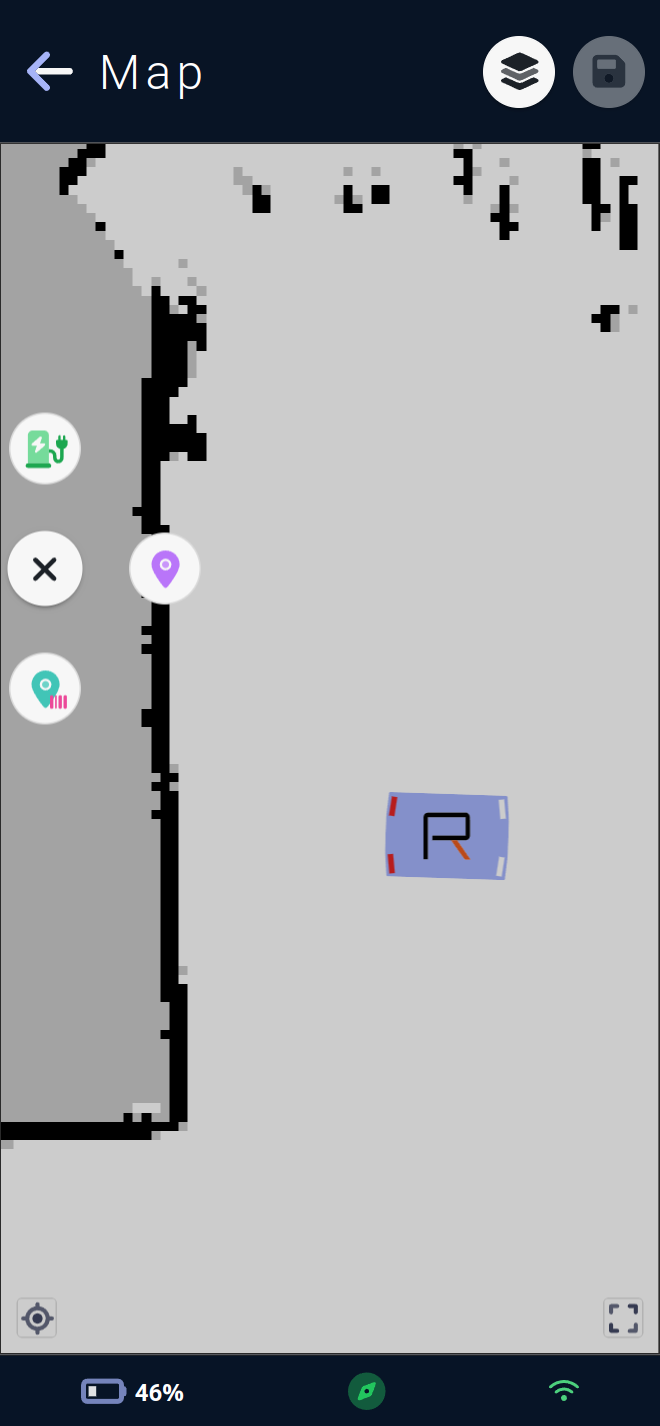
Ce menu permet d'ajouter trois types d'élément sur la carte.
L'icône station de charge avec sa prise 🔌 permet de lancer le processus d'ajout d'une
station de charge.L'icône repère de carte permet de lancer le processus d'ajout d'une
position sauvegardée.L'icône repère de carte avec code-barres permet de lancer le processus d'ajout d'une
position dockée.
Station de charge
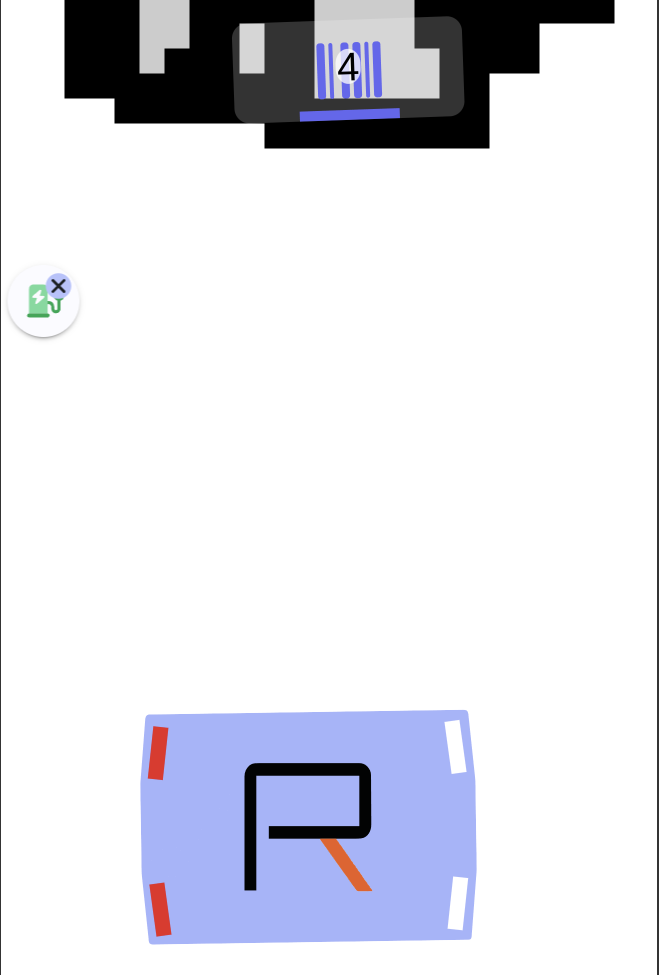
La station de charge est un élément de la carte permettant au véhicule de se recharger en entrant en contact avec son dock via ses pins de chargements. Le processus de docking pour pouvoir entrer en contact avec sa station est particulier et requiert un guidage précis du véhicule sur le marqueur de la station, ce déplacement spécial commence à une certaine distance de la station : la distance d'approche. À l'inverse, si le véhicule est docké, il doit d'abord se dédocker avant de pouvoir effectuer des déplacements autonomes. Il effectuera donc un déplacement en marche arrière d'une distance appelée distance de dédockage.
Sur la carte 🗺️ cet élément est représenté par un rectangle plein gris aux dimensions de la station, une barre bleue représentant le marqueur de la station, ainsi qu'une empreinte rectangle à la taille du véhicule en vert, avec une icône de station de charge correspondant à la position dockée du véhicule.
Si plusieurs stations de charge sont présentes, l'une doit être définie en station de charge préférée permettant au véhicule d'aller se charger automatiquement à celle-ci si le véhicule passe en dessous de son seuil de batterie critique.
Une fois le processus d'ajout lancé, le véhicule va scanner les alentours. S’il trouve un marqueur, il sera affiché sur la carte avec son ID détecté et la vue sera zoomée sur le véhicule et les marqueurs trouvés.
Un clic sur un marqueur terminera l'ajout de la station de charge et ouvrira directement le formulaire d'édition de celle-ci pour pouvoir modifier le nom, la description ou les distances d'undock et d'approche et définir si la station est la préférée du véhicule.
Les actions disponibles via le menu de cet élément sont la suppression 🗑, l'ouverture du formulaire d'édition ⚙️, et le déclenchement d'un déplacement à la station de charge.
La liste des champs éditables du formulaire d'édition d'une station de charge est organisée ainsi :
Général
On y retouve les paramètres généraux de la station de charge :
UUID 🆔 :
UUID, l'ID de la station au sein de la carte.
Ce champ n'est pas éditable car généré par le véhicule à la sauvegarde d'une carte comportant l'élément. A la création, les éléments ont tous pour UUID -1.
Marqueur 🔢 :
Marker, le marqueur associé à lastation de charge.
Le marqueur est l'identifiant visuel de la station sur lequel le véhicule peut se guider très précisement. Ce champ n'est pas éditable.
Nom 🪪 :
Name, le nom de la station.
Nommer les stations de charge peut-être pratique pour des configurations futures.
Description 🗒️: Une description de la
station de charge.
Paramètres
Ces paramètres modifient la configuration de la station de charge.
Station de charge préférée ⭐ :
Preferred charging station, la station de charge préférée du véhicule est la station de charge à laquelle se rendra le véhicule automatiquement si sa batterie passe en dessous duseuil de batterie critique. Cocher une station décochera les autres stations de la carte, le véhicule ne pouvant avoir qu'une seule station préférée.
Cochée ou non.
Distance de dédockage 🔙 :
Undock distance, la distance de dédockage est la distance en arrière effectuée par le véhicule lors d'un dédockage.
Entre 0.5 et 1 m, 0.5 par défaut.
Distance d'approche 🔜 :
Approach distance, la distance d'approche est la distance de la station à laquelle le véhicule commencera à chercher le marqueur et se guidera très précisement sur celui-ci.
Entre 0.5 et 1 m, 0.5 par défaut.
NB: Pour tous les formulaires d'édition, il est possible d'afficher et de cacher certaines sections de réglages, et de sauvegarder cet état de visibilité via le petit cadenas 🔒. Lors de l'ouverture d'un formulaire, les sections avec des valeurs différentes de celles par défaut seront automatiquement ouvertes (sauf si une sauvegarde sur la fermeture via un cadenas a été réglée) ainsi que toutes les sections qui ont été sauvegardées en position ouvertes précédemment. Pratique pour identifier quel réglage a été configuré ou faire de la configuration à la chaîne sur plusieurs éléments du même type par exemple.
Position sauvegardée
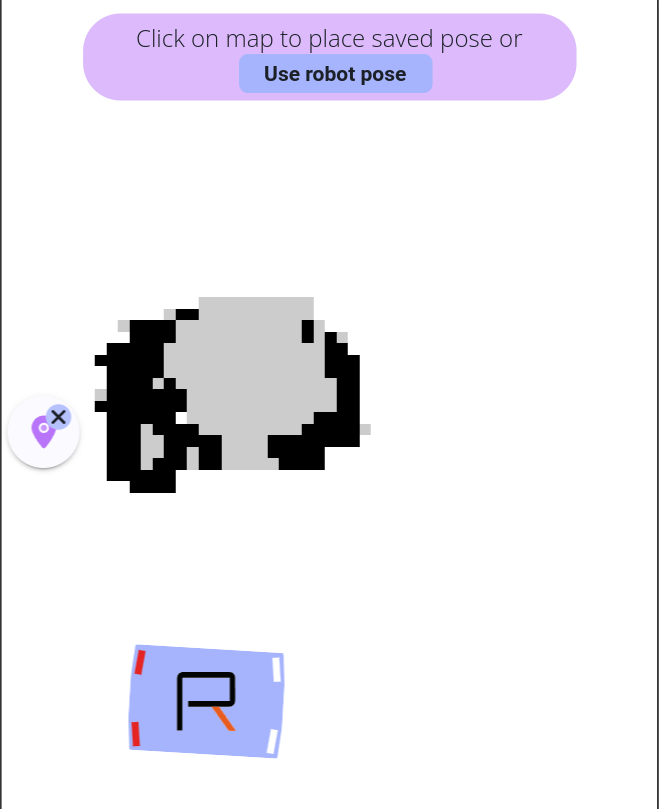
La position sauvegardée est un élément de la carte permettant au véhicule d'enregistrer une position dans sa carte. Cela permet par la suite de déclencher un déplacement dessus via un ordre de déplacement, une étape de la séquence d'autopilot, voire via la mission de son module.
Sur la carte 🗺️ cet élément est représenté par une empreinte rectangle à la taille du véhicule dans une couleur personnalisable, avec une icône également personnalisable.
Pour ajouter une position sauvegardée, il suffit de cliquer à la position souhaitée sur la carte pour définir l'emplacement, et le second clic permettra de définir l'orientation de l'élément.
Le bouton Use robot pose est disponible dans l'aide en haut de page, il suffit donc de déplacer le véhicule à la position souhaitée et d'utiliser sa position actuelle pour placer la position sauvegardée.
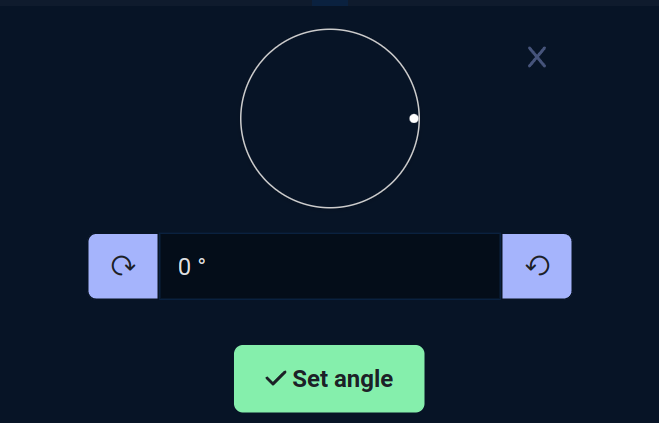
Sur un écran tactile 📱, l'orientation se définit via un sélecteur d'angle. Une fois le processus de création terminé, le formulaire d'édition s'ouvre et permet de modifier le nom, la description, l'icône et la couleur mais aussi régler à nouveau l'angle de l'élément.
Les actions disponibles via le menu de cet élément sont la suppression 🗑, l'ouverture du formulaire d'édition ⚙️, le processus de clonage de la position sauvegardée, le processus de translation et le déclenchement d'un déplacement à la position sauvegardée.
La liste des champs éditables du formulaire d'édition d'une position sauvegardée est organisée ainsi :
Général
On y retouve les paramètres généraux de la position sauvegardée :
UUID 🆔 :
UUID, l'ID de la position sauvegardée au sein de la carte.
Ce champ n'est pas éditable car généré par le véhicule à la sauvegarde d'une carte comportant l'élément. A la création, les éléments ont tous pour UUID -1.
Nom 🪪 :
Name, le nom de la position sauvegardée.
Nommer les positions sauvegardées peut-être pratique pour des configurations futures.
Description 🗒️: Une description de la
position sauvegardée.
Affichage
Ces paramètres modifient l'affichage de la position sauvegardée.
Couleur 🟦 :
Color, la couleur dans laquelle sera dessinée la position sauvegardée sur la carte.
Un sélecteur de couleur apparaîtra pour faciliter le choix de la couleur.
Icône ❔ :
Icon, l'icône qui sera dessinée sur la carte.
Un sélecteur d'icône apparaîtra pour faciliter le choix de l'icône.
Orientation
Angle 🧭 : l'orientation de la
position sauvegardée.
L'angle est configurable via la roue et les deux boutons qui ajoute ou enlève 5 degrés.
NB: Pour tous les formulaires d'édition, il est possible d'afficher et de cacher certaines sections de réglages, et de sauvegarder cet état de visibilité via le petit cadenas 🔒. Lors de l'ouverture d'un formulaire, les sections avec des valeurs différentes de celles par défaut seront automatiquement ouvertes (sauf si une sauvegarde sur la fermeture via un cadenas a été réglée) ainsi que toutes les sections qui ont été sauvegardées en position ouvertes précédemment. Pratique pour identifier quel réglage a été configuré ou faire de la configuration à la chaîne sur plusieurs éléments du même type par exemple.
Position dockée
La position dockée est un élément de la carte permettant au véhicule de se placer très précisément par rapport à un marqueur (> 1 cm), c'est la parfaite fusion entre une position sauvegardée et une station de charge pour le côté marqueur. Tout comme la station de charge, le véhicule va effectuer un processus de docking sur le marqueur lors d'un déplacement vers une position dockée.
Cet élément est utilisé si le véhicule doit se rendre très précisément, par exemple en fin de convoyeur pour recevoir un objet sortant d'exploitation, dans les cas ou la précision de la navigation autonome (> 5cm) ne suffirait pas.
Sur la carte 🗺️ cet élément est représenté par une empreinte rectangle à la taille du véhicule dans une couleur personnalisable, avec une icône également personnalisable ainsi qu'une barre bleue représentant le marqueur.
Une fois le processus d'ajout lancé, le véhicule va scanner les alentours. S’il trouve un marqueur, il sera affiché sur la carte avec son ID détecté et la vue sera zoomée sur le véhicule et les marqueurs trouvés.
Un clic sur un marqueur terminera l'ajout de la position dockée et ouvrira directement le formulaire d'édition de celle-ci pour pouvoir modifier le nom, la description, l'icône et la couleur ou les distances d'undock et d'approche et de désactivation de la sécurité. Cette dernière permettant de désactiver la sécurité d'obstacles et de se docker près d'un objet normalement considéré comme un obstacle.
Les actions disponibles via le menu de cet élément sont la suppression 🗑, l'ouverture du formulaire d'édition ⚙️, et le déclenchement d'un déplacement à la position dockée.
La liste des champs éditables du formulaire d'édition d'une position dockée est organisée ainsi :
Général
On y retouve les paramètres généraux de la position dockée :
UUID 🆔 :
UUID, l'ID de la position dockée au sein de la carte.
Ce champ n'est pas éditable car généré par le véhicule à la sauvegarde d'une carte comportant l'élément. A la création, les éléments ont tous pour UUID -1.
Marqueur 🔢 :
Marker, le marqueur associé à laposition dockée.
Le marqueur est l'identifiant visuel de la position dockée sur lequel le véhicule peut se guider très précisement. Ce champ n'est pas éditable.
Nom 🪪 :
Name, le nom de la position dockée.
Nommer les positions dockées peut-être pratique pour des configurations futures.
Description 🗒️: Une description de la
position dockée.
Paramètres
Ces paramètres modifient la configuration de la position dockée.
Distance de dédockage 🔙 :
Undock distance, la distance de dédockage est la distance en arrière effectuée par le véhicule lors d'un dédockage.
Entre -2m et 2m, une valeur négative équivaut à une distance effectué en avant.
Distance d'approche 🔜 :
Approach distance, la distance d'approche est la distance de la position à laquelle le véhicule commencera à chercher le marqueur et se guidera très précisement sur celui-ci.
Entre 0 et 2 m, 0.8 par défaut.
Distance de désactivation des sécurités ⚠ :
Disable safety distance, la distance de désactivation des sécurités est la distance de la position à laquelle le véhicule désactivera la sécurité pour venir très près d'un obstacle ce qui lui est impossible en temps normal, égale à la distance d'approche peut-être différents pour des configurations particulières.
Entre 0 et 2 m.
Paramètres Avancés
Ces paramètres avancés permettent une modification plus poussée du comportement du véhicule concernant la position dockée . Certains modifient potentiellement dangereusement les sécurités du véhicule et doivent être utilisés en connaissance de cause.
Distance guidée ⬆️ :
Guided distance, la distance guidée. Il s'agit de la distance à partir de laquelle le véhicule n'est autorisé qu'à avancer tout droit par exemple en cas de présence de rail d'alignement.
Entre 0 et 2 cm, 0 par défaut.
Vitesse maximale 🚗 :
Max speed, la vitesse maximale. Il s'agit de la vitesse maximale à laquelle le véhicule est autorisé a effectuer son processus de docking.
Entre 0.1 et 0.3 m/s, 0.3 par défaut.
Contact autorisé 🫸:
Contact allowed, le contact autorisé. Par défaut le véhicule considère le processus de docking comme un échec si il vient à pousser sur quelque chose, ce paramètre permet d'indiquer au véhicule de considérer ce cas comme un succès, par exemple dans le cas ou le robot doit s'accrocher a un élément externe.
Activé ou non.
Tolérance de succès au contact ✅:
Contact success tolerance, la tolérance de succès au contact.définit la marge de tolérance permettant de considérer le processus de docking comme réussi. Si le véhicule est autorisé à entrer en contact avec une structure, cette valeur représente la distance maximale entre sa position actuelle et la position dockée pour valider le succès du docking.
Entre 5 et 50 mm, 5 par défaut.
Seuil ampérage moteurs ⚡:
Motors amps threshold, le seuil ampérage moteurs. Il s'agit de la limite d'ampérage autorisé sur les moteurs du véhicule lors d'un processus de docking, si le robot entre en contact avec quelque chose l'ampérage sur les moteurs peut augmenter, ce paramètre en limite la valeur.
Entre 5 et 8 ampères, 5 par défaut.
Durée seuil ampérage moteurs ⏱:
Motors amps timer threshold, la durée seuil ampérage moteurs. Il s'agit de la durée limite durant laquelle l'ampérage autorisé sur les moteurs du véhicule peut être dépassé, l'ampérage autorisé est défini par le paramètre précedent.
Entre 0.5 et 1 s, 0.5 par défaut.
NB: Pour tous les formulaires d'édition, il est possible d'afficher et de cacher certaines sections de réglages, et de sauvegarder cet état de visibilité via le petit cadenas 🔒. Lors de l'ouverture d'un formulaire, les sections avec des valeurs différentes de celles par défaut seront automatiquement ouvertes (sauf si une sauvegarde sur la fermeture via un cadenas a été réglée) ainsi que toutes les sections qui ont été sauvegardées en position ouvertes précédemment. Pratique pour identifier quel réglage a été configuré ou faire de la configuration à la chaîne sur plusieurs éléments du même type par exemple.
Menu Configuration
Ce menu permet de configurer le comportement de déplacement et autre du véhicule sur la carte :
En ajoutant des
zones personnalisables, représentées par l'icône polygone bleue. Un clic sur ce bouton lancera le processus d'ajout d'une zone.En ajoutant des
zones interdites, représentées par l'icône polygone rouge avec l'icône interdite ⛔. Un clic sur ce bouton lancera le processus d'ajout d'une zone.En configurant des
routes de circulationvia l'icône route et cadenas 🔒. Un clic sur ce bouton ouvrira le menu des routes.En configurant le comportement global du véhicule sur la carte via l'icône carte 🗺️. Un clic sur ce bouton ouvrira directement le formulaire d'édition du comportement sur la carte.
Zone personnalisable
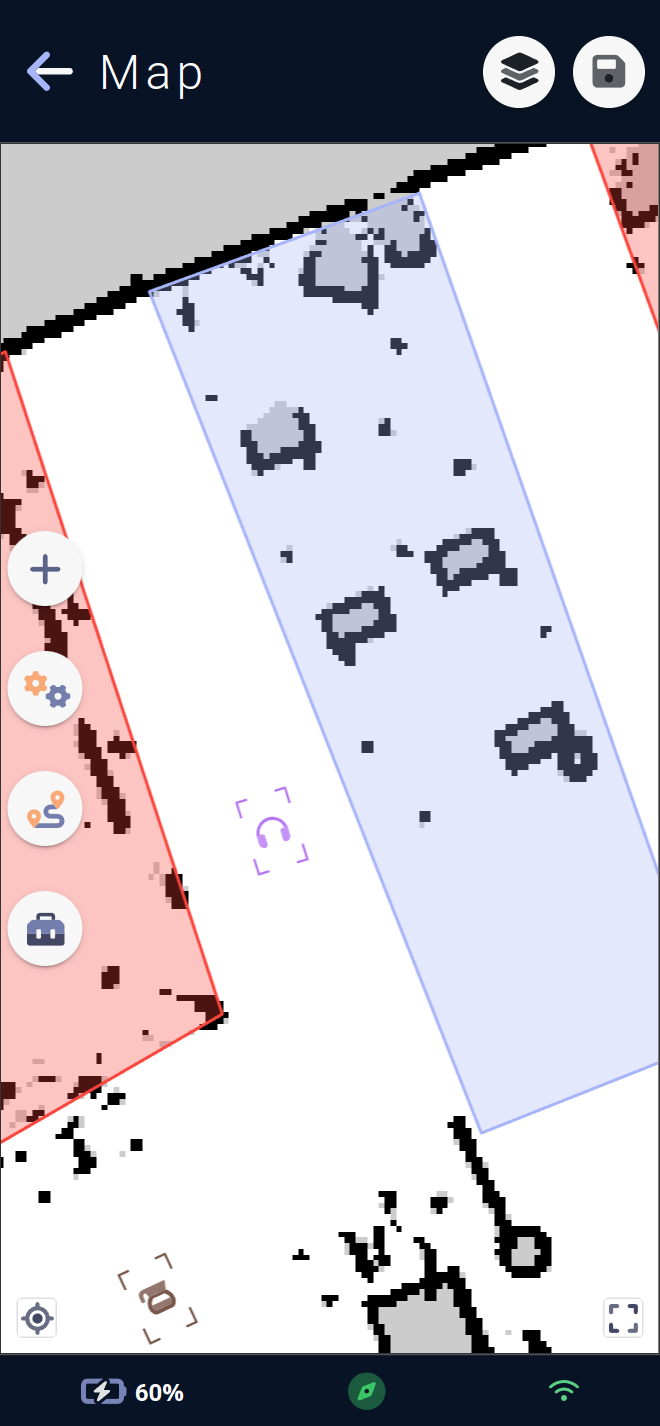
La zone personnalisable est un élément de la carte permettant de configurer des comportements spéciaux ⚙️ du véhicule à l'intérieur de celle-ci, mais également en y entrant ou en y sortant.
Sur la carte 🗺️ cet élément est représenté par un polygone de forme paramétrable via ses arêtes, dans une couleur personnalisable.
Pour ajouter une zone personnalisable, il suffit de cliquer sur la position souhaitée sur la carte pour créer la première arête du polygone, et chaque clic ajoutera une nouvelle arête.
Pour terminer le polygone il suffit de cliquer sur le premier point auparavant dessiné.
NB : le polygone doit au moins avoir 3 arêtes.
Une fois le processus de création terminé, le formulaire d'édition du comportement associé à la zone s'ouvre.
Une zone personnalisable peut influer le comportement du véhicule sur différents points.
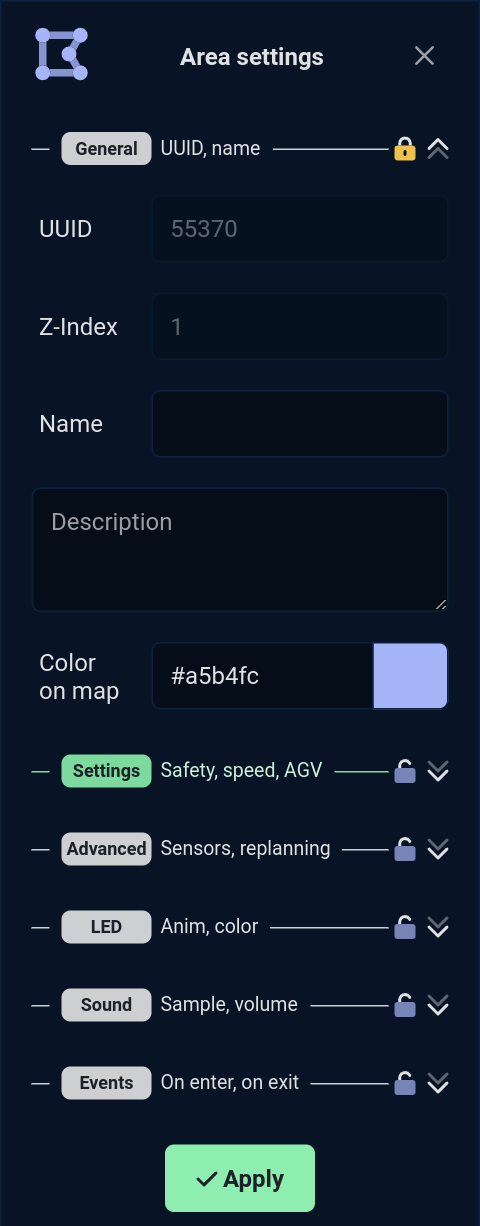
La liste des champs éditables du formulaire d'édition d'une zone personnalisable est organisée ainsi :
Général
On y retouve les paramètres généraux de la zone personnalisable :
UUID 🆔 :
UUID, l'ID de la zone au sein de la carte.
Ce champ n'est pas éditable car généré par le véhicule à la sauvegarde d'une carte comportant l'élément. A la création, les éléments ont tous pour UUID -1.
Nom 🪪 :
Name, le nom de la zone personnalisable.
Nommer les zones particulières peut-être pratique pour des configurations futures.
Description 🗒️: Une description de la zone.
Couleur 🟦 : la couleur dans laquelle sera dessinée la zone sur la carte.
Un sélecteur de couleur apparaîtra pour faciliter le choix de la couleur.
Paramètres
Ces paramètres modifient le comportement du véhicule.
Vitesse maximale 🚗 :
Max speed, la vitesse maximale du véhicule se déplacant dans la zone. Cela peut être utile pour réduire la vitesse dans une zone dense ou l'augmenter dans une zone peu fréquentée.
Entre 0.1 et 1.0 m/s, par défaut le véhicule se déplace à 0.5m/s.
Marges de sécurité ↔️ :
Safety margin, les distances auxquelles le véhicule évite de s'approcher des obstacles. Cela peut être utile lorsque le véhicule doit passer par des espaces restreints comme un couloir étroit ou une porte.
Entre -0.15 et 0.8 m, une valeur négative réduira les marges de sécurité par défaut.
Mode AGV 🛤️ :
AGV mode, le mode véhicule à guidage contraint. Par défaut le véhicule s'autorise le droit de dévier de sa trajectoire initiale pour éviter un obstacle et continuer sa progression, le mode AGV interdit au véhicule de dévier de sa trajectoire et il s'arrêtera en cas d'obstacle et repartira une fois celui-ci disparu.
Activé ou non.
Paramètres Avancés
Ces paramètres avancés permettent une modification plus poussée du comportement du véhicule. Certains modifient potentiellement dangereusement la planification de trajectoires ou la sécurité et doivent être utilisés en connaissance de cause.
Délai de replanification ⏱️ :
Replanning timeout, le délai de replanification. Il s'agit du temps en secondes avant lequel le véhicule peut planifier à nouveau une trajectoire vers son but. Lors d'un déplacement le véhicule peut rencontrer un obstacle qu'il ne peut pas éviter ou contourner, il va alors effectuer une replanification pour voir si il y aurait un autre chemin pour atteindre son objectif malgré l'obstacle, ce paramètre influe sur le délai dans lequel il décide de replanifier.
Entre 0 et 60 secondes.
Hauteur minimale des obstacles ↕️ :
Min obstacle height, la hauteur minimale des obstacles. Il s'agit de la hauteur minimale pour lesquels le véhicule considérera une détection comme un obstacle lors de sa planification de trajectoire.
Entre 0 et 0.2m soit 20cm.
Filtre caméras 3D 📷 :
3D camera safety, le filtre sécurité des cameras 3D. Il s'agit d'un filtre pour diminuer la sécurité des caméras 3D en cas d'une proportion de faux positifs sur les caméras 3D, liés à l'environnement, trop élevé.❗Une valeur inférieure à 100 influe directement sur la sécurité du véhicule qui ignorera une part plus ou moins importante des obstacles vus par les caméras du véhicule. A UTILISER EN CONNAISSANCE DE CAUSE ⚠️.
L'application utilise un slider avec 4 valeurs disponibles pour régler ce paramètre :
0 Pas de protection
70 Protection basse
85 Protection moyenne
100 Protection totale
Entre 0 et 100, par défaut 100.
Mode avion ✈ :
No connection in area, le mode sans connexion. Permet d'indiquer au véhicule que cette zone est dépourvue ou pourvue d'une connexion quelconque. Peut être utile si le module du véhicule doit envoyer des informations via réseau externe. Le véhicule peut alors savoir si il se trouve dans une zone couvrant le réseau ou à défaut en chercher une dans sa carte via ce paramètre.
Activé ou non, à coupler avec le mode sans connexion général de la carte.
Capteurs à ultrasons 🔊 :
US sensors, la désactivation des capteurs à ultrasons. Permet d'indiquer au véhicule de pas prendre en compte le retour d'information ses capteurs à ultrasons dans cette zone. Peut être utile si une zone est soumise à des perturbations ultrasoniques.❗Désactiver les ultrasons influe directement sur la sécurité du véhicule qui ignorera potentiellement des obstacles seulement détectés par les capteurs à ultrasons du véhicule. A UTILISER EN CONNAISSANCE DE CAUSE ⚠️.
Activé ou non.
LED
Permet de régler l'animation et la couleur des LEDs du véhicule pendant qu'il se trouvera dans la zone personnalisable.
Animation LED 🚥 :
LED Anim, l' animation des LEDs parmi toutes celles disponibles sur le véhicule.
Si aucune animation n'est sélectionnée, les prochains paramètres des LEDs seront cachés.
Couleur LED 🟦 :
LED Color, la couleur des LEDs.
Certaines animations comme le drapeau français ne nécessitent pas de configuration de couleur et ce menu déroulant sera caché dans le cas d'une sélection d'une de ces animations.
Son
Permet de régler le son joué en boucle par le véhicule pendant qu'il se trouvera dans la zone personnalisable.
Son 🎶 :
Sound, le jingle sonore à jouer parmi tous ceux disponibles sur le véhicule.
Si aucun jingle n'est sélectionné, les prochains paramètres sonores seront cachés.
Volume 🔊 :
Volume, le volume auquel jouer le jingle pendant que le véhicule est présent dans la zone.
L'application utilise un bouton de volume avec 3 valeurs disponibles pour régler ce paramètre :
LowVolume faible 10MediumVolume moyen 55HighVolume fort 100
Entre 0 et 100, par défaut 100, sera ensuite limité par la valeur du scénario de son Area du véhicule.
Délai de boucle ⌛ :
Loop delay, l'attente en secondes entre deux jingles joués par le véhicule tant qu'il se trouve dans la zone.
0 ou plus secondes, par défaut 0.
Evènements
Permet de régler le son joué et les LEDs affichées par le véhicule quand il rentrera ou sortira de la zone personnalisable.
Les deux événements d'entrée dans la zone On enter et de sortie de la zone On exit sont paramétrables de la même façon suivante :
LEDs
Animation LED 🚥 :
LED Anim, l' animation des LEDs parmi toutes celles disponibles sur le véhicule.
Si aucune animation n'est sélectionnée, les prochains paramètres des LEDs seront cachés.
Couleur LED 🟦 :
LED Color, la couleur des LEDs.
Certaines animations comme le drapeau français ne nécessitent pas de configuration de couleur et ce menu déroulant sera caché dans le cas d'une sélection d'une de ces animations.
Durée LED ⌛ :
LED duration, la durée pendant laquelle les LEDs seront affichées une fois l'événement déclenché.
1 ou plus secondes, par défaut 5.
Son
Son 🎶:
Sound, le jingle sonore à jouer parmi tous ceux disponibles sur le véhicule.
Si aucun jingle n'est sélectionné, les prochains paramètres sonores seront cachés.
Nombre de boucles ⌛:
Loop count, le nombre de fois que le jingle sera joué.
Une valeur inférieure à 2 sur ce paramètre rendra logiquement le paramètre de délai de boucle inutile.
Volume 🔊 :
Volume, le volume auquel jouer le jingle une fois l'événement déclenché.
L'application utilise un bouton de volume avec 3 valeurs disponibles pour régler ce paramètre :
LowVolume faible 10MediumVolume moyen 55HighVolume fort 100
Entre 0 et 100, par défaut 100, sera ensuite limité par la valeur du scénario de son Area du véhicule.
Délai de boucle ⌛ :
Loop delay, l'attente en secondes entre deux jingles joués par le véhicule tune fois l'événement déclenché.
0 ou plus secondes, par défaut 0.
NB: Pour tous les formulaires d'édition, il est possible d'afficher et de cacher certaines sections de réglages, et de sauvegarder cet état de visibilité via le petit cadenas 🔒. Lors de l'ouverture d'un formulaire, les sections avec des valeurs différentes de celles par défaut seront automatiquement ouvertes (sauf si une sauvegarde sur la fermeture via un cadenas a été réglée) ainsi que toutes les sections qui ont été sauvegardées en position ouvertes précédemment. Pratique pour identifier quel réglage a été configuré ou faire de la configuration à la chaîne sur plusieurs éléments du même type par exemple.
Zone interdite
La zone interdite est un élément de la carte permettant d'indiquer au véhicule des zones interdites à la navigation ⛔. Le véhicule ne pourra ni les traverser, ni sortir de celles-ci s'il s'y retrouvait via un déplacement physique ou via Teleop joystick mode Libre.
Il refusera les ordres qui lui obligeraient à la rencontrer dans sa trajectoire.
⚠️ Attention, l'ajout de zones interdites est une opération critique du véhicule ⚠️
Certains endroits précis doivent être "protégés" par une zone interdite (ex : Escalator...) et l'opérateur 👷🏽♂️ modifiant ces zones sur la carte doit être formé par l'équipe Rob'Occ ou équivalent.
Sur la carte 🗺️ cet élément est représenté par un polygone de forme paramétrable via ses arêtes, dans une couleur rouge 🟥.
Pour ajouter une zone interdite, il suffit de cliquer sur la position souhaitée sur la carte pour créer la première arête du polygone, et chaque clic ajoutera une nouvelle arête.
Pour terminer le polygone il suffit de cliquer sur le premier point auparavant dessiné.
NB : le polygone doit au moins avoir 3 arêtes.
Une fois le processus de création terminé, il est possible d'en recréer une autre et ainsi créer les zones interdites à la chaîne.
Un formulaire d'édition est disponible pour la zone interdite et permet de régler un nom et une description.
Routes de circulations
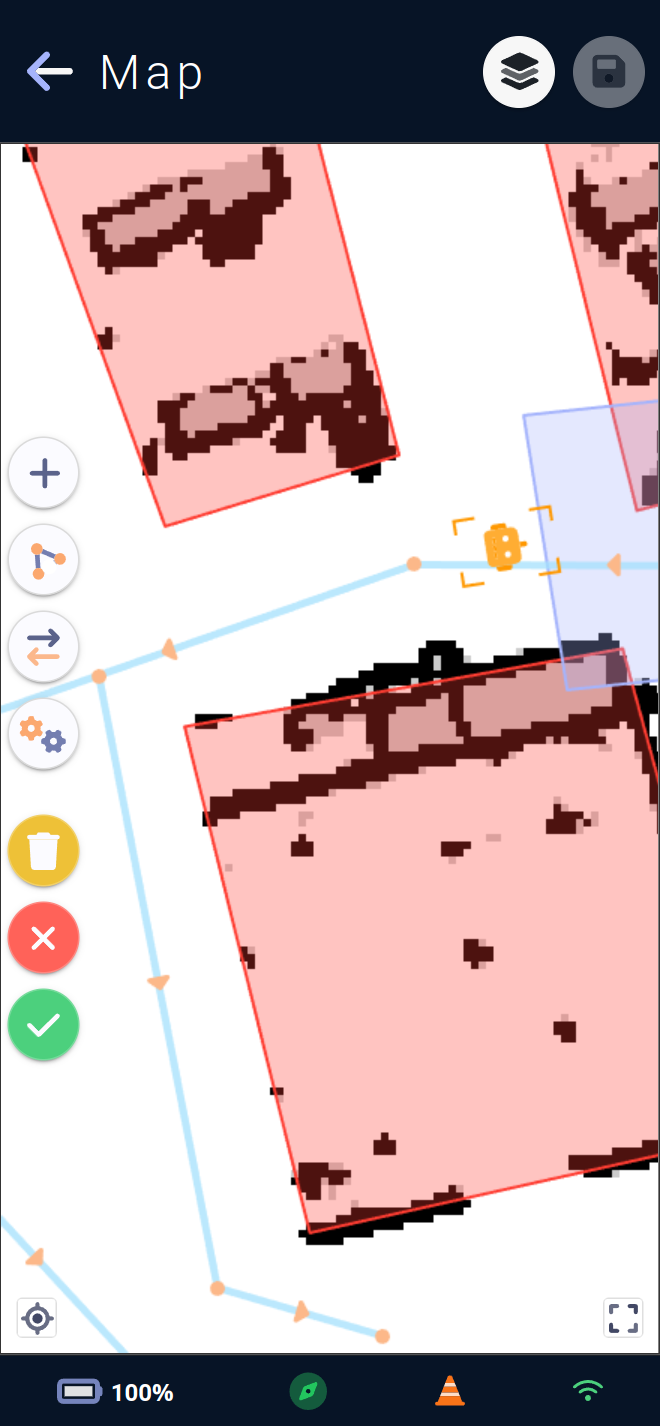
Les routes de circulations permettent d'indiquer au véhicule comment se déplacer dans sa carte active. Elles permettent de définir des zones de circulations à sens unique ou de préciser comment un véhicule doit longer un mur dans un sens, puis l'autre mur dans le sens opposé, par exemple.
Les routes sont, sur la carte, en vert si elles sont configurées en double sens, en bleu si elles sont en sens unique. Les triangles permettent alors de voir dans quel sens elles sont paramétrées.
Il est possible de sélectionner une route en cliquant dessus, un bouton apparaît pour pouvoir supprimer la route. La séléction de route n'est possible que si le menu route est ouvert et qu'aucun mode de fonctionnement des routes (ajout, édition...) n'est en cours.
Le menu route se divise de la façon suivante:
L'icône plus ➕ lance le processus de création de nouvelles routes, le premier clic pose l'origine de la route, les clics suivants des étapes sur cette route, pour terminer la création il suffit soit de re-cliquer sur le dernier point, soit de re-cliquer sur l'icône plus.
L'icône de dessin permet de modifier les routes déjà créées en déplaçant un sommet, ou en ajoutant une étape dans une route en cliquant directement sur le segment de la route pour y ajouter un point. Un clic à nouveau sur ce bouton permet de sortir de ce mode d'édition des routes.
L'icône double flèche permet de modifier le sens des routes en cliquant à la volée sur toutes les routes nécessitant un changement de sens. La route alternera alors entre les différents sens : droit, inverse et double. Un clic à nouveau sur ce bouton permet de sortir de ce mode de changement de sens des routes.
L'icône double engrenage ⚙️ permet d'ouvrir le formulaire d'édition des paramètres liés aux routes.
L'icône poubelle jaune 🗑️ permet d'effacer toutes les routes et revenir à une carte sans aucune route.
L'icône croix rouge ❌ permet d'annuler les modifications sur les routes effectuées depuis la dernière ouverture du menu route.
L'icône coche verte ✅ permet de sauvegarder les modifications sur les routes effectuées depuis la dernière ouverture du menu route.
NB : Les modifications ne s'appliqueront qu'à la prochaine sauvegarde de la carte.
Création et édition de routes
Lors de la création d'un nouveau sommet ou du déplacement d'un sommet existant, si son emplacement est validé sur un autre sommet déja présent alors le sommet déplacé ou crée est fusionné avec le sommet déja présent.
Paramètres des routes
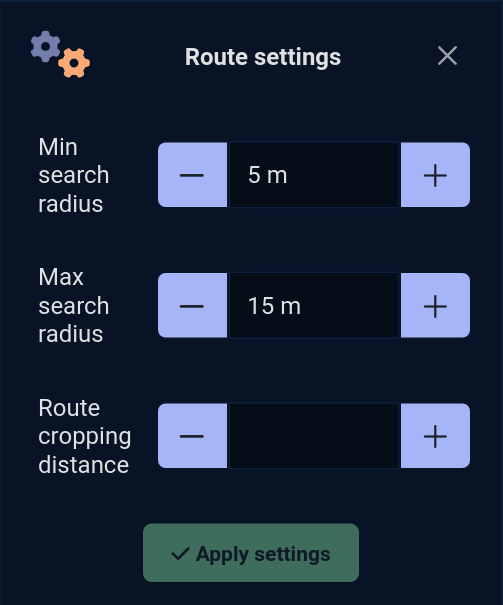
Trois paramètres influent sur le comportement du véhicule :
Rayon de recherche min :
Min search radius, la distance minimale à laquelle le véhicule recherche une route depuis sa position.
Entre 1 et 20 mètres, par défaut 5.
Rayon de recherche max:
Max search radius, la distance maximale à laquelle le véhicule recherche une route depuis sa position.
Entre 1 et 100 mètres, par défaut 15.
Distance de rognage:
Route cropping distance, la distance ignorée, rognée par le véhicule lorsqu'il utilise lesroutes de circulation, peut faciliter la navigation.
Entre 0 et 300 centimètres, par défaut 0.
Obstacles liés aux routes
Lors de la configuration des routes de circulation, il est possible que certaines routes soient trop près d'un mur, d'une zone interdite ou d'une zone personnalisable ayant des réglages de marges de sécurité trop contraignantes.
Le véhicule estimera donc que certaines des routes sont inutilisables et il créera un obstacle lié aux routes.
Sur la carte ces obstacles sont facilement repérable d'un point exclamation❗dans un cercle rouge.
Il est alors nécessaire de corriger le problème, pour que le véhicule puisse utiliser ses routes de circulation sans problème.
NB : le véhicule ne peux détecter et supprimer les obstacles liées aux routes seulement si la navigation autonome est lancée.
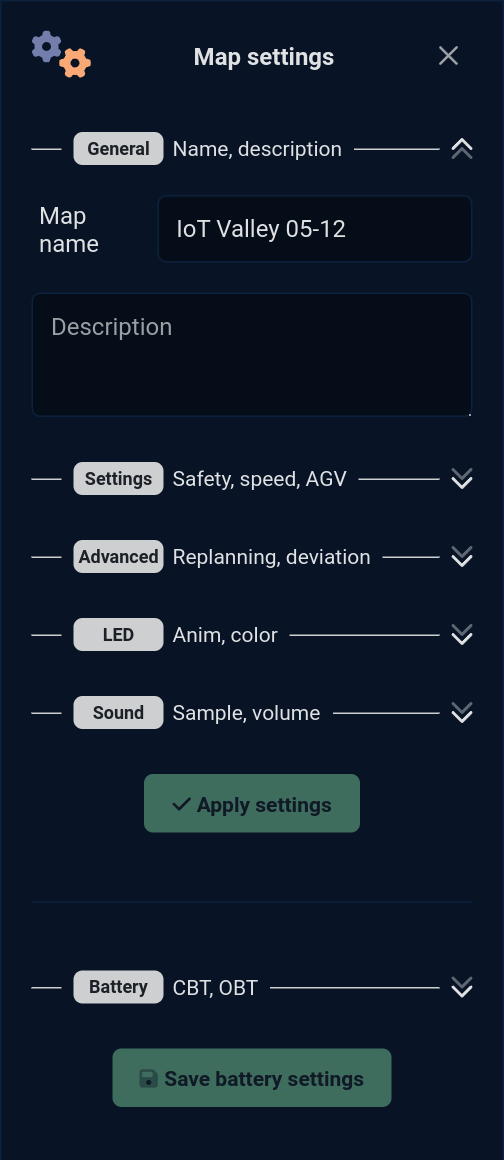
Paramètres de la carte
Les paramètres globaux de la carte permettent de configurer des comportements spéciaux ⚙️ du véhicule sur toute la carte sans avoir à créer une zone personnalisable sur l'étendue de la carte.
Couplé à des zones personnalisables, le véhicule peut donc avoir des comportements modifiés sur l'ensemble de la carte, et s'il rentre dans une zone personnalisable venir appliquer une nouvelle valeur sur un des champs.
Cela permet par exemple, d'indiquer au véhicule d'aller à une vitesse max de 0.7m/s sur la carte et de la réduire à nouveau dans des zones spécifiques (fortement dense).
Ce formulaire permet aussi de modifier le nom et la description de la carte active.
La liste des champs éditables du formulaire d'édition globale de la carte est organisée ainsi :
Général
On y retouve les paramètres généraux de la carte active :
Nom 🪪:
Name, le nom de la carte active.
Par défaut, la carte aura le même nom que le site dans lequel elle a été créée.
Description 🗒️: Une description de la carte active.
Paramètres
Ces paramètres modifient le comportement du véhicule.
Vitesse maximale 🚗:
Max speed, la vitesse maximale du véhicule, appliquée sur la carte entière hors d'unezone personnalisableou la vitesse maximale aurait été configurée avec une valeur différente.
Entre 0.1 et 1.0 m/s, par défaut le véhicule se déplace à 0.5m/s.
Marges de sécurité ↔️ :
Safety margin, les distances auxquelles le véhicule évite de s'approcher des obstacles, appliquées sur la carte entière hors d'unezone personnalisableou les marges de sécurité aurait été configurées avec une valeur différente.
Entre -0.15 et 0.8 m, une valeur négative réduira les marges de sécurité par défaut.
Mode AGV 🛤️ :
AGV mode, le mode véhicule à guidage contraint. Par défaut le véhicule s'autorise le droit de dévier de sa trajectoire initiale pour éviter un obstacle et continuer sa progression, le mode AGV interdit au véhicule de dévier de sa trajectoire et il s'arrêtera en cas d'obstacle et repartira une fois celui-ci disparu.
Activé ou non.
Station de charge préférée 🔌:
Preferred charging station, la station de charge préférée du véhicule, c'est la station à laquelle le véhicule se rendra automatiquement si il passe en dessous de sonseuil de batterie critique.
UUID d'une station présente dans la carte.
Paramètres Avancés
Ces paramètres avancés permettent une modification plus poussée du comportement du véhicule. Certains modifient potentiellement dangereusement la planification de trajectoires ou la sécurité et doivent être utilisés en connaissance de cause.
Délai de replanification ⏱️ :
Replanning timeout, le délai de replanification. Il s'agit du temps en secondes avant lequel le véhicule peut planifier à nouveau une trajectoire vers son but. Lors d'un déplacement le véhicule peut rencontrer un obstacle qu'il ne peut pas éviter ou contourner, il va alors effectuer une replanification pour voir si il y aurait un autre chemin pour atteindre son objectif malgré l'obstacle, ce paramètre influe sur le délai dans lequel il décide de replanifier, appliqué sur la carte entière hors d'unezone personnalisableou le délai de planification aurait été configuré avec une valeur différente.Hauteur minimale des obstacles ↕️ :
Min obstacle height, la hauteur minimale des obstacles. Il s'agit de la hauteur minimale pour laquelle le véhicule considérera une détection comme un obstacle, appliquée sur la carte entière hors d'unezone personnalisableou la hauteur minimale des obstacles aurait été configurée avec une valeur différente.
Entre 0 et 0.2m soit 20cm.
Mode avion ✈ :
No connection in area, le mode sans connexion. Permet d'indiquer au véhicule que cette carte est dépourvue ou pourvue d'une connexion quelconque. Peut être utile si le module du véhicule doit envoyer des informations via réseau externe. Le véhicule peut alors savoir si il se trouve dans une zone couvrant le réseau ou à défaut en chercher une dans sa carte via ce paramètre.
Activé ou non, à coupler avec le mode sans connexion des zones personnalisables de la carte.
LED
Permet de régler l'animation et la couleur des LEDs du véhicule appliquées sur la carte entière hors d'une zone personnalisable ou les LEDs aurait été configurée avec des valeurs différentes.
Animation LED 🚥 :
LED Anim, l' animation des LEDs parmi toutes celles disponibles sur le véhicule.
Si aucune animation n'est sélectionnée, les prochains paramètres des LEDs seront cachés.
Couleur LED 🟦 :
LED Color, la couleur des LEDs.
Certaines animations comme le drapeau français ne nécessitent pas de configuration de couleur et ce menu déroulant sera caché dans le cas d'une sélection d'une de ces animations.
Son
Permet de régler le son joué en boucle par le véhicule appliqué sur la carte entière hors d'une zone personnalisable ou le son aurait été configurée avec des valeurs différentes.
Son 🎶 :
Sound, le jingle sonore à jouer parmi tous ceux disponibles sur le véhicule.
Si aucun jingle n'est sélectionné, les prochains paramètres sonores seront cachés.
Volume 🔊 :
VolumeLe volume auquel jouer le jingle.
L'application utilise un bouton de volume avec 3 valeurs disponibles pour régler ce paramètre :
LowVolume faible 10MediumVolume moyen 55HighVolume fort 100
Entre 0 et 100, par défaut 100, sera ensuite limité par la valeur du scénario de son Area du véhicule.
Délai de boucle ⌛ :
Loop delayL'attente en secondes entre deux jingles joués par le véhicule tant qu'il se trouve dans la zone. 0 ou plus secondes, par défaut 0.
Batterie
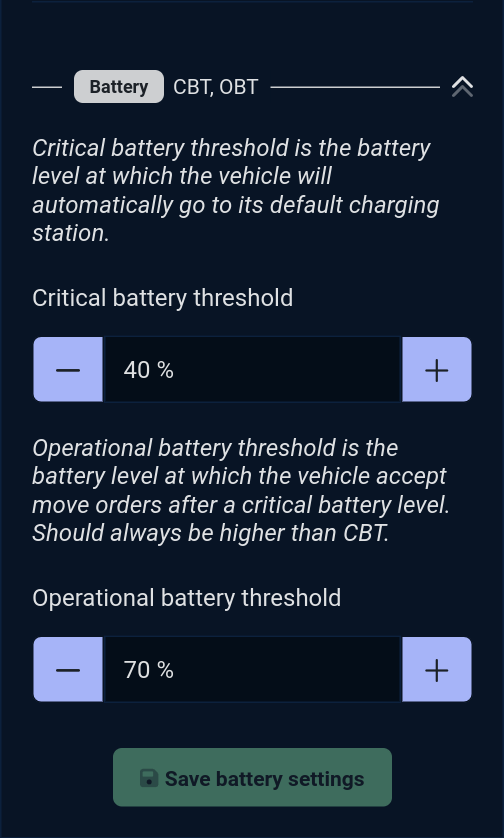
Permet de régler les deux valeurs de batteries liées à la carte active.
CBT 🪫 :
Critical battery threshold, seuil de batterie critique. C'est le niveau de batterie à partir duquel le véhicule se rendra automatiquement à sa station de charge par défaut pour se recharger. Suivant la taille de la carte ce seuil peut être régler pour s'assurer que le véhicule puisse rejoindre sa station qu'importe l'endroit de la carte où ce seuil serait atteint.OBT 🔋 :
Operational battery threshold, seuil de batterie opérationnelle. C'est le niveau de batterie à partir duquel le véhicule accepte les ordres de déplacement après une batterie ayant atteinte le seuil de batterie critique. Il doit toujours être supérieur au CBT. Ce seuil peut être plus ou moins éloigné du CBT pour garantir au véhicule une utilisation plus ou moins durable après avoir atteint un seuil de batterie critique.
NB : Certains modules biberonnent le véhicule, c'est-à-dire qu'ils l'envoient à la charge si aucune mission n'est en cours, le laissant ainsi se recharger tout au long de l'utilisation et ces deux seuils peuvent être inutilisés.
Menu Déplacement
Ce menu permet de déplacer le véhicule.
L'icône cible 🎯 permet d'envoyer le véhicule à la position cliquée sur la carte, l'orientation se définit via un sélecteur d'angle.
L'icône joystick 🕹️ permet d'ouvrir le joystick virtuel de la carte (cf. #Déplacement).
L'icône flèche ➡️ permet de dessiner un segment de navigation qui sera directement effectué par le véhicule.
Il se déplacera en navigation autonome jusqu'au début du segment et effectuera une trajectoire entièrement rectiligne jusqu'au bout du segment. Un comportement de déplacement rectiligne où le véhicule ne dévie pas de sa ligne (il s'arrêtera en cas d'obstacle mais ne contournera pas) peut être utile pour certains cas d'utilisation.
L'icône prise électrique 🔌 permet d'envoyer le véhicule à sa station de charge préférée.
Menu Boîte à outils
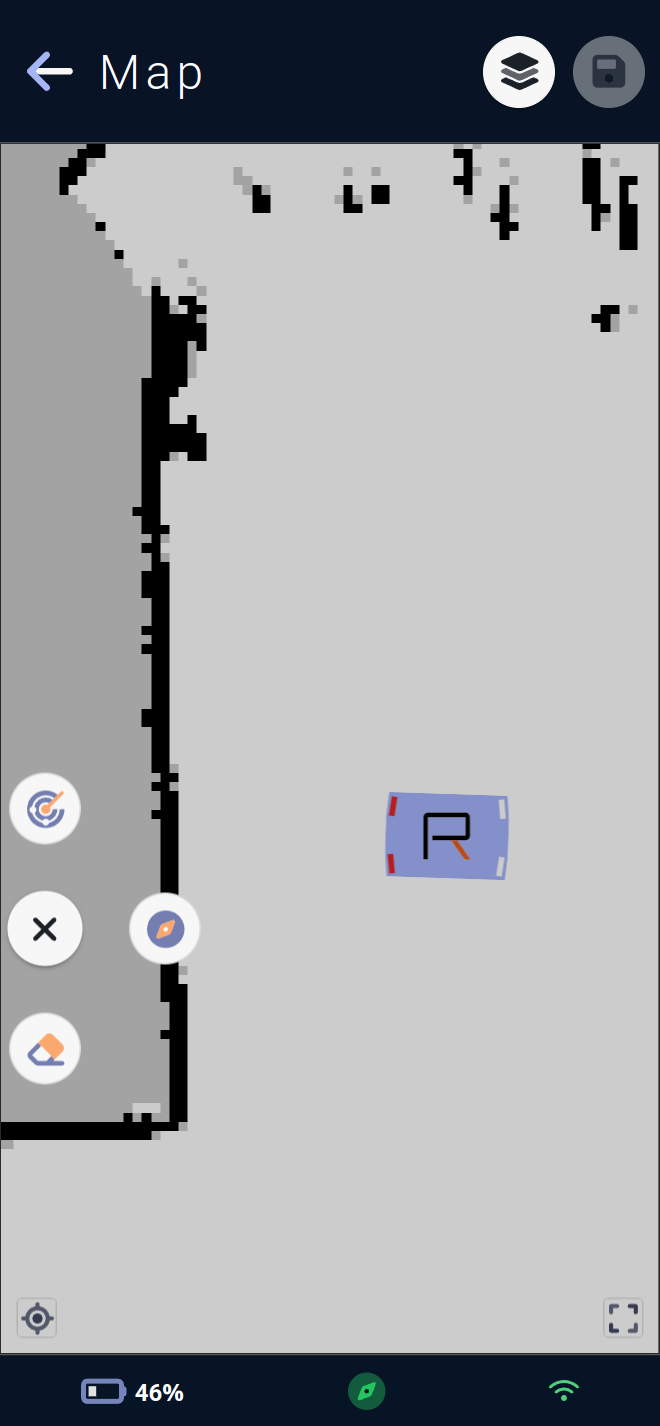
Ce menu permet d'utiliser des outils disponibles pour la carte ou pour le véhicule.
L'icône radar 📡 demande au véhicule d'effectuer une
relocalisation: le véhicule va scanner les alentours et, s’il trouve un marqueur en mémoire dans sa carte, il se repositionnera parfaitement par rapport à ce marqueur.
Ce processus lance également la navigation autonome du véhicule si celle-ci n'était pas démarrée.
L'icône boussole 🧭 permet de localiser à la main le véhicule en cliquant sur la carte à l'endroit ou le véhicule se situe physiquement. Le véhicule se croira alors à cette position. Une fois localisé, le véhicule se recallera lui-même en fonction des éléments qu'il vera et la position à laquelle il a été manuellement localisé.
⚠️ Attention, la localisation manuelle est une opération critique du véhicule ⚠️
Le véhicule pourrait se perdre totalement et ignorer les zones interdites par exemple si sa localisation n'est pas bonne et l'opérateur 👷🏽♂️ qui utilise ce processus doit être formé par l'équipe Rob'Occ ou équivalent.
Ce processus lance également la navigation autonome du véhicule si celle-ci n'était pas démarrée.
L'icône gomme 🧽 permet d'ouvrir le menu gomme, via la gomme il est possible d'effacer directement sur la carte des reliquats impurs de cartographie ou de supprimer des obstacles qui ne sont plus présents physiquement. Gommer peut améliorer la localisation et la navigation autonome du véhicule.
⚠️ Attention, gommer la carte est une opération critique du véhicule ⚠️
Menu Gomme
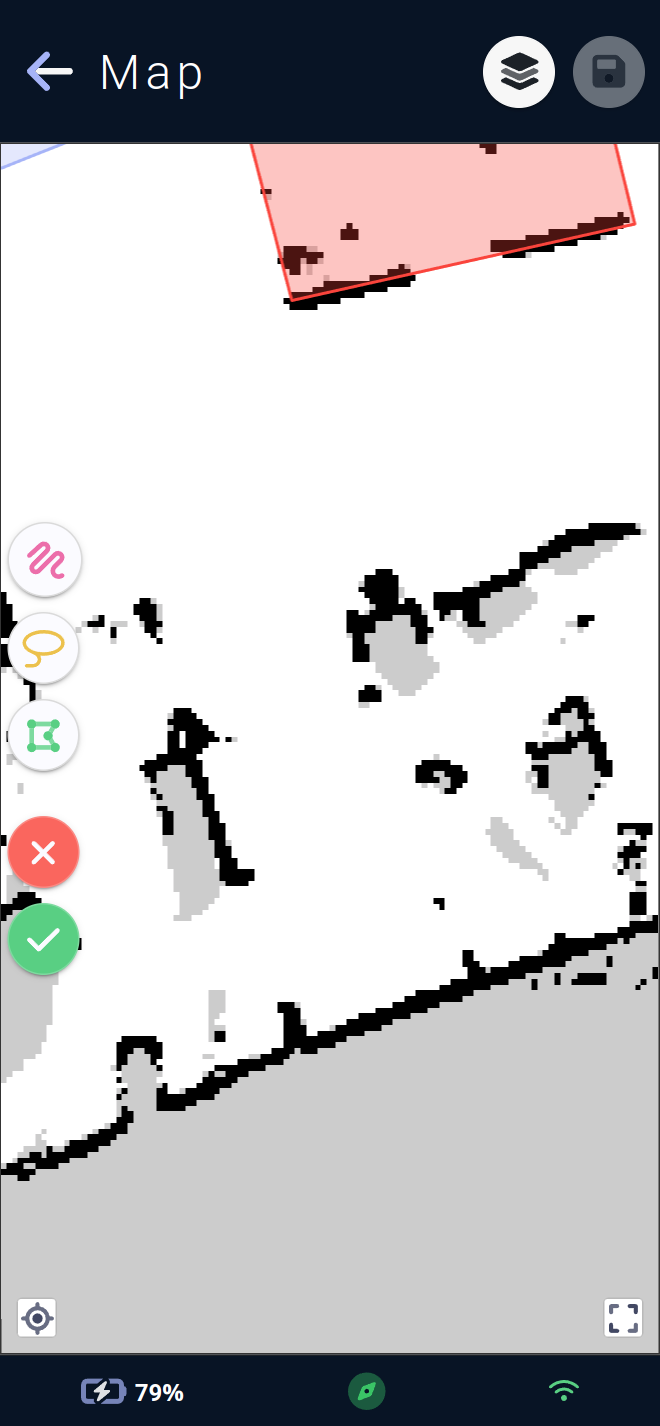
Le menu gomme permet d'ajouter des zones à gommer de trois façons différentes :
L'icône dessin à main levée permet de créer des gommes à main levée. Cela dessinera tant que la souris, ou le doigt si l'on accède à l'application via un téléphone 📱 ou une tablette, reste appuyé sur la carte.
L'icône lasso permet de créer des gommes en entourant la zone à effacer. Une fois la souris relâchée (ou le doigt), un polygone se formera à l'intérieur de la zone dessinée sur la carte.
L'icône polygone permet de créer des gommes de la même manière que les
zones interditesou leszones personnalisables, il suffit de cliquer sur la position souhaitée sur la carte pour créer la première arête du polygone, et chaque clic ajoutera une nouvelle arête. Pour terminer le polygone il suffit de cliquer sur le premier point auparavant dessiné.Le bouton rouge avec une croix ❌ annule toutes les modifications non sauvegardées des gommes et permet de revenir à une carte sans gomme (toutes les gommes visibles à l'écran seront supprimées).
Le bouton vert arborant une coche ✔️ permet au véhicule d'effacer les zones dessinées sur sa carte. Cela lui permet de retirer des éléments de sa planification de trajectoire, mais peut également affecter sa localisation, car il peut y avoir moins de correspondances entre ce qu'il voit et ce qu'il sait être normalement présent sur la carte.
Les deux derniers boutons demanderont une confirmation avant de supprimer ou d'appliquer les gommes présentes sur la carte.
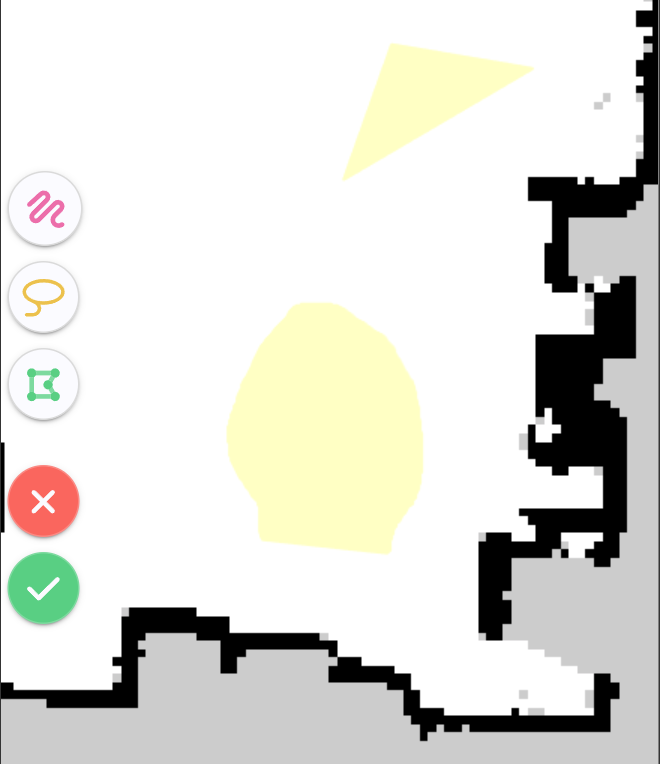
Une fois les gommes dessinées, elles sont visibles en jaune sur la carte et représentent les zones qui seraient nettoyées par le véhicule. Il est possible de les supprimer en les sélectionnant sur la carte et en utilisant l'icône poubelle 🗑️.
La sélection n'est possible que si aucun mode de création n'est actuellement choisi. Le mode de création en cours est indiqué en jaune via son bouton sur le menu et annulable en cliquant à nouveau sur ce même bouton.
Menu Calques
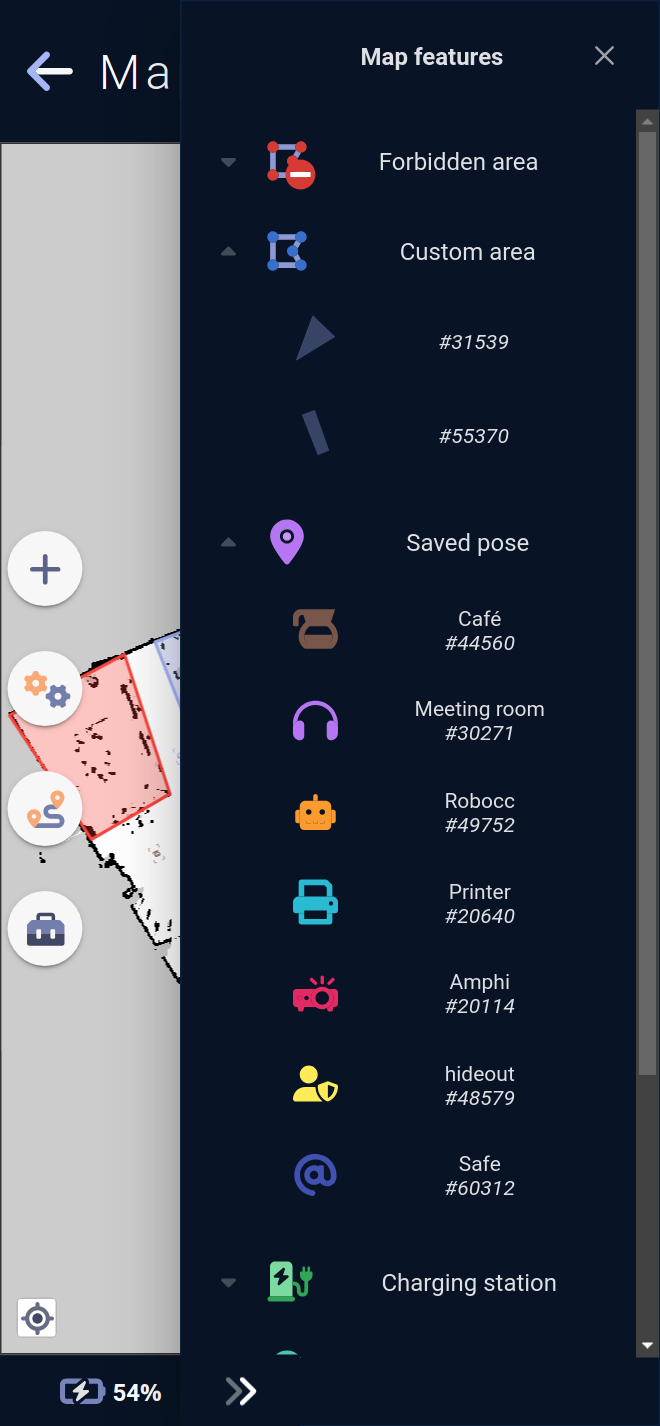
Ce menu permet de cacher ou d'afficher certains calques ou éléments de la carte ainsi que de sélectionner un élément de la carte.
Un clique sur l'icône permet de cacher ou d'afficher le groupe d'élements sur la carte.
Les listes peuvent être ouvertes pour lister les éléments.
Dans le cas d'un élément avec une icône et une couleur personnalisable (position sauvegardée, position dockée ...), l'élement aura l'icône correspondante dans la couleur renseignée. Dans le cas d'une zone personnalisable ou zone interdite, un dessin de la forme de la zone sera présent.
Un clique sur l'icone d'un élement permet de cacher ou d'afficher l'élément, un clique sur son nom permet de le sélectionner.
En cas de sélection, la vue de la carte sera centrée sur l'élément nouvellement sélectionné.
NB: Sur ordinateur, pour plus de facilité, l'élément sera pré-sélectionné en passant le curseur dessus.