Cas d'utilisation
Configurer une étagère
Description
Un ROC-E équipé d'un module Picker (ROC-EP) a la possibilité de déplacer une étagère équipée du système d'accroche.
Pour pouvoir déplacer une étagère, le robot a besoin :
d'une position spécifique pour la prise d'étagère,
d'une position spécifique pour la dépose d'étagère.
La position spécifique de dépose de l'étagère doit être à proximité immédiate d'un marqueur pour que le robot puisse déposer une étagère de manière précise.
Lors de la dépose, le robot vérifiera, dans un premier temps, que l'espace nécessaire pour l'étagère n'est pas occupé.
Configuration
Position pour la prise d'étagère
Positionner l'étagère à l'emplacement où elle doit être prise.
Positionner le robot sous l'étagère (la position du robot n'a pas besoin d'être très précise, le robot se repositionnera automatiquement au bon endroit lors de la prise en fonction de la position réelle de l'étagère)
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Aller dans la partie
Carteen cliquant sur le bouton dédié.Cliquer sur le bouton
+pour ajouter un nouvel élément.Cliquer sur le bouton
Ajouter la nouvelle position d'étagère.Modifier ensuite la nouvelle position créée ;
Personnaliser le nom, l'icône et la couleur de la position.
Indiquer les dimensions de l'étagère (largeur, profondeur, hauteur et poids).
Configurer la hauteur de l'ascenseur ; cette hauteur sera la hauteur maximale à laquelle l'ascenseur peut monter, l'ascenseur s'arrêtera automatiquement quand il aura détecté le contact avec l'étagère ; cette hauteur doit donc être légèrement plus élevée que la position quand il y a contact ;
Cliquer sur le bouton de la
Hauteur de l'ascenseur.Cliquer sur les flèches pour ajuster la hauteur de l'ascenseur ; l'étagère doit être légèrement soulevée.
Cliquer sur le bouton
Utiliser cette position.
Position pour la dépose d'étagère
Positionner un marquer à proximité de la position de dépose. Ce marqueur doit être visible du robot lors de son approche et une fois en position.
Positionner le robot à l'emplacement souhaité pour la dépose de l'étagère. Cette position doit être précise.
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Aller dans la partie
Carteen cliquant sur le bouton dédié.Cliquer sur le bouton
+pour ajouter un nouvel élément.Cliquer sur le bouton
Ajouter la nouvelle position dockée.Modifier ensuite la nouvelle position créée ; personnaliser le nom, l'icône et la couleur de la position.
Configurer une station de picking
Description
Un ROC-E équipé d'un module Picker (ROC-EP) a la possibilité de prendre et de déposer de manière automatique une caisse sur des stations de picking.
Pour pouvoir prendre ou déposer une caisse sur une station de picking, le robot a besoin d'une position spécifique pour la station de picking,
Lors de la dépose, le robot vérifiera, dans un premier temps, qu'il n'y a pas de caisse déjà présente sur la station de picking.
Configuration
Positionner la station de picking à l'emplacement souhaité pour la prise ou la dépose de caisses.
Positionner le robot sous la station de picking de manière précise (le robot se mettra précisément à cette position à chaque fois).
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Aller dans la partie
Carteen cliquant sur le bouton dédié.Cliquer sur le bouton
+pour ajouter un nouvel élément.Cliquer sur le bouton
Ajouter la nouvelle position dockée.Modifier ensuite la nouvelle position créée ;
Personnaliser le nom, l'icône et la couleur de la position.
Sélecionner
Pickingdans le choix deType de stationIndiquer les dimensions de la caisse (largeur, profondeur, hauteur du robot + caisse et poids).
Configurer la hauteur de l'ascenseur ;
Cliquer sur le bouton de la
Hauteur de l'ascenseurCliquer sur les flèches pour ajuster la hauteur de l'ascenseur ; la caisse doit être surélevée de 1 cm au-dessus de la station.
Cliquer sur le bouton
Utiliser cette position
Reproduire cette configuration pour toutes les stations de picking.
Configurer l'ouverture d'une porte
Description
A travers un contrôleur LoRa, un robot a la possibilité de piloter l'ouverture de portes automatiques.
Pour pouvoir piloter une porte automatique, le robot a besoin :
d'une zone personnalisée pour activer l'ouverture de la porte dans un sens de franchissement,
d'une zone personnalisée pour activer l'ouverture de la porte dans l'autre sens de franchissement.
Si la porte automatique est équipée d'un détecteur de présence pour s'ouvrir automatiquement dans un sens de franchissement, la zone personnalisée ne sera pas nécessaire.
Un contrôleur LoRa peut piloter jusqu'à 2 portes proches.
Installation du contrôleur LoRa
Connexion
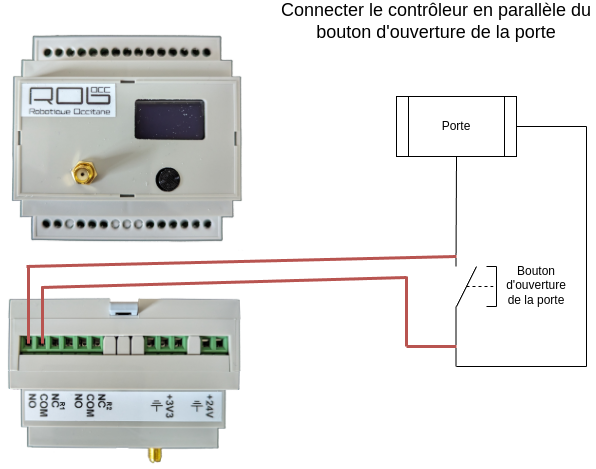
Configuration
Consulter la documentation du contrôleur LoRa pour configurer la durée de l'impulsion à utiliser pour ouvrir la porte.
Généralement, une impulsion de 200 ms permet d'ouvrir les portes automatiques.
Test
Consulter la documentation du contrôleur LoRa pour tester la configuration et valider que la porte s'ouvre.
Préparation des zones
Comme indiqué en préambule, il est nécessaire de définir des zones pour piloter l'ouverture des portes automatiques.
Le principe est le suivant ; si le robot a besoin de franchir la porte automatique, il déclenchera la commande d'ouverture dès qu'il rentrera dans la zone.
Il est donc nécessaire de créer une zone "devant" et "derrière" la porte pour le déclenchement de la commande.
La taille de la zone dépend de la vitesse d'ouverture de la porte, ainsi si une porte est lente, on mettra une grande zone pour déclencher l'ouverture au plus tôt et fluidifier la navigation du robot.
Pour rajouter une zone sur la carte ;
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Cliquer sur le menu
Paramètres avancés.Se connecter si nécessaire.
Cliquer sur le menu
Map.Cliquer sur l'icône configuration dans le menu sur la gauche.
Cliquer sur l'icône bleue des zones paramétrables.
Dessiner la zone désirée sur la carte.
Modifier le nom dans le panneau de gauche pour retrouver plus facilement la zone après.
Configuration
Ajout du contrôleur LoRa
La première étape de la configuration consiste à déclarer le contrôleur LoRa dans le système ;
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Cliquer sur le menu
Contrôleurs LoRa.Cliquer sur le bouton
Ajouter un contrôleur LoRa.Indiquer l'identifiant du contrôleur (affiché sur l'écran du contrôleur).
Indiquer un nom (ex : Ouverture porte).
Cliquer sur le bouton
Ajouter.
Configuration des commandes personnalisées
La deuxième étape de la configuration consiste à configurer le robot pour qu'il envoie un ordre d'ouverture quand il aura besoin de traverser la porte.
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Cliquer sur le menu
Commandes personnalisées.Cliquer sur le bouton
Ajouter une commande personnalisée.Indiquer un nom (ex : Ouverture porte pour rentrer).
Sélectionner la zone de déclenchement de la commande (zone "devant ou "derrière" la porte).
Sélectionner toutes les positions vers lesquelles le robot se dirige quand il doit ouvrir la porte. Il est possible d'actionner le switch
Toutes saufen haut pour n'avoir à sélectionner que les positions non concernées.Sélectionner
En entrantetDans la zone.Sélectionner le contrôleur précédemment créé.
Pour la commande, sélectionner
Relais 1 > Impulsion(ou relais 2 si la porte a été connectée sur le relais 2).Cliquer sur
Ajouter.
Faire de nouveau cette configuration pour ouvrir la porte dans l'autre sens de navigation.
Configurer un point d'attente
Description
Dans le cas d'une flotte de robot, plusieurs robots peuvent s'auto bloquer dans des cas particulier comme la présence d'un couloir étroit sans autre chemin alternatifs.
Dans ces cas, il peut être intéressant de mettre en place des points d'attente pour qu'un robot libère le passage pour les autres robots.
Il peut être également intéressant de mettre en place un point d'attente dans le cas où un chemin alternatif existe mais son utilisation engendrerais une perte trop importante de temps.
Pour mettre en place un point d'attente, le robot a besoin :
d'une destination (le robot n'ira sur le point d'attente que dans le cas où il se dirige vers la destination, cela permet d'avoir des points d'attente de chaque côté du couloir en fonction du déplacement du robot),
d'une position d'attente,
de la zone à dégager.
Si le robot échoue son déplacement dans la zone à dégager (par exemple, présence d'un autre robot à contre sens), le robot partira autimatiquement se mettre en attente sur la position d'attente.
Le robot repartira automatiquement au bout de x minutes (x étant paramétrable dans la configuration des délais) ou si un autre robot indique qu'il viens de sortir de la zone.
Préparation des zones
Zone à dégager
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Cliquer sur le menu
Paramètres avancés.Se connecter si nécessaire.
Cliquer sur le menu
Map.Cliquer sur l'icône configuration dans le menu sur la gauche.
Cliquer sur l'icône bleue des zones paramétrables.
Dessiner la zone désirée sur la carte.
Modifier le nom dans le panneau de gauche pour retrouver plus facilement la zone après.
Position d'attente
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Cliquer sur le menu
Carte.Cliquer sur le bouton vert
+.Cliquer sur le bouton
Ajouter la nouvelle position sauvegardée.Sélectionner la nouvelle position créée
Cliquer sur le bouton avec le crayon pour la modifier
Modifier le nom pour retrouver plus facilement la position après.
Configuration
Une fois la zone ainsi que la position d'attente créées ;
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Aller dans la partie
Points d'attenteen cliquant sur le bouton dédié.Cliquer sur le bouton
+ Ajouter un point d'attente.Sélectionner la destination ; ce point d'attente ne sera utilisé que si le robot se dirige vers cette destination.
Sélectionner la position d'attente précédemment créée.
Sélectionner la zone précédemment créée.
Configurer des messages prédéfinis
Description
Dans certains cas, il peut être utile qu'un opérateur laisse un message pour l'opérateur présent au poste où le robot est envoyé.
Notre solution permet de configurer des messages prédéfinis que l'opérateur pourra sélectionner pour être affichés quand le robot arrivera à sa destination.
Par exemple, le robot peut être utilisé pour envoyer des produits au service contrôle et il peut être utile que l'opérateur précise si c'est un premier de série ou un échantillon aléatoire.
Configuration
Sur l'écran du robot ;
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite et en indiquant le code d'accès.Aller dans la partie
Messages prédéfinisen cliquant sur le bouton dédié.Ajouter un ou plusieurs messages en cliquant sur le bouton
+ Ajouter un message.Saisir votre message
Ajouter le message
Une fois un message ajouté, celui-ci peut être modifié ou supprimé avec les boutons dédiés.
Utilisation
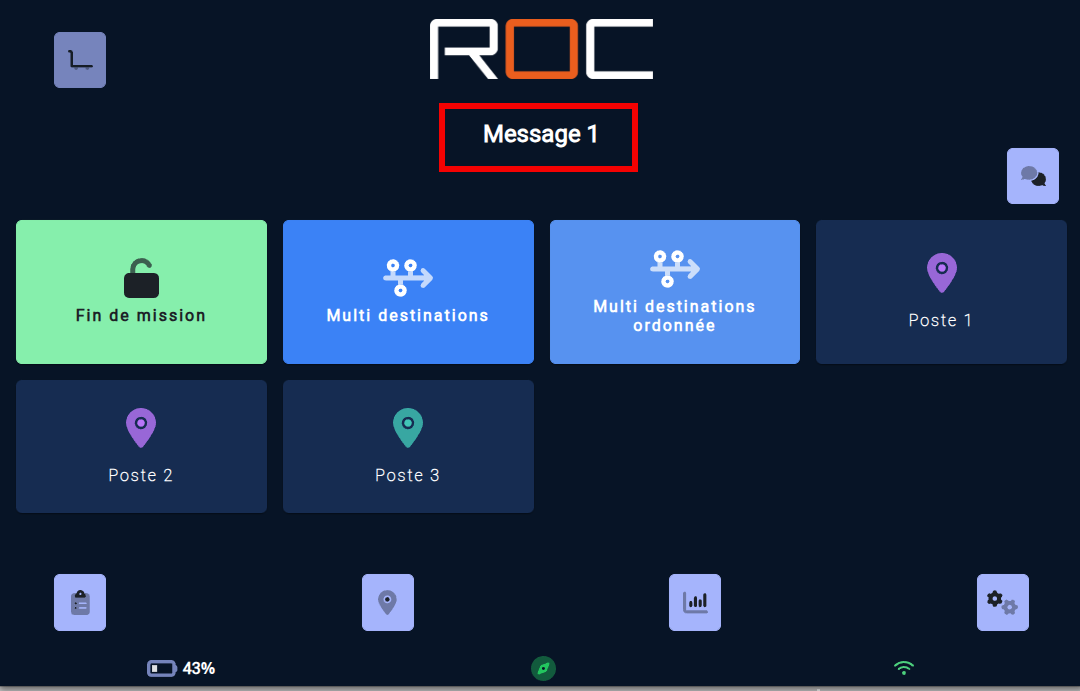
Une fois un ou plusieurs messages prédéfinis configurés, l'utilisateur aura accès à de nouveaux boutons pour indiquer un message ;
Page principale ; un bouton en haut à droite permet de sélectionner le message pour la prochaine mission.
En cliquant sur le bouton, l'utilisateur pourra sélectionner le message parmi la liste des messages existants.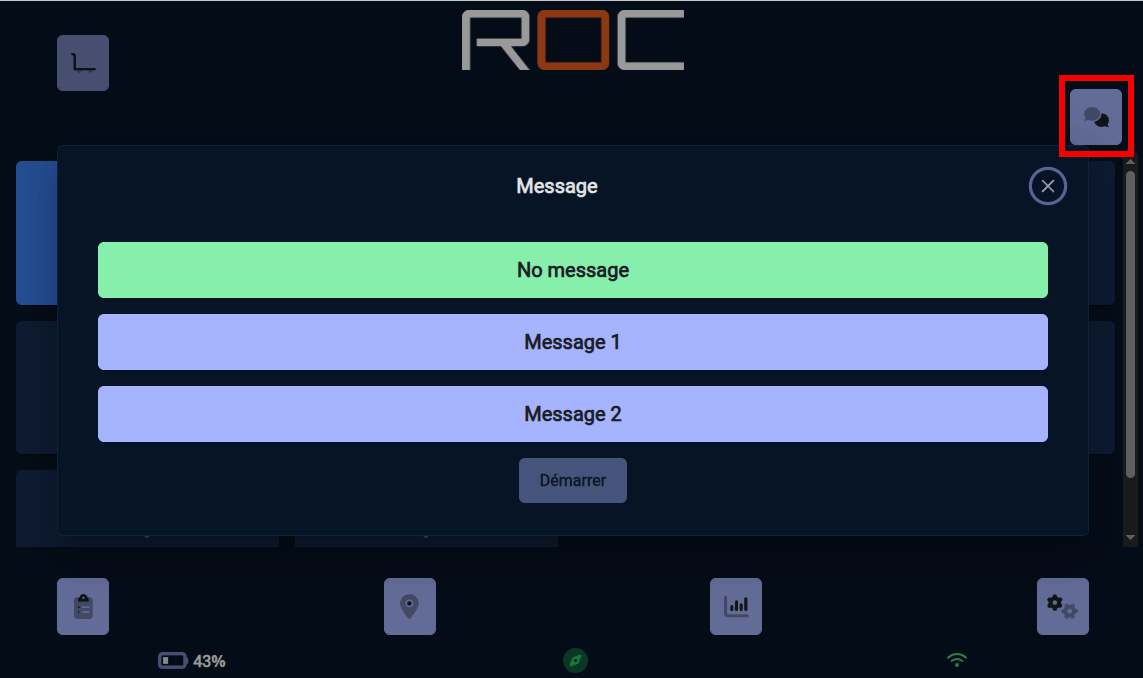
Multi destination et multi destinations ordonnées ; une fois une destination sélectionnée, un bouton permet de sélectionner le message à afficher quand le robot sera à la destination sélectionnée.

Le robot affichera automatiquement le ou les messages prédéfinis au moment adapté ;
Synchroniser les robots et le manager
Description
Les robots d'une flotte ainsi que le manager ont besoin d'être synchroniser pour utiliser la même carte et les mêmes configuration.
Il est donc nécessaire de mettre à jour les équipements une fois une modificition faite sur un des équiepement (robot ou manager).
Pour les modifications simples, il peut-être plus rapide de refaire la configuration sur chaque équipement (par exemple pour l'ajout d'un bouton).
Le risque potentiel est qu'un équipement n'est pas la même configuration ques les autres (par exemple, un robot pourrait ne pas connaître la configuration d'un bouton et ne pourrait donc pas exécuter cette mission).
Pour les modifications plus complexes, le plus simple et le plus fiable est d'exporter la configuration de l'équipement où la modification a été faite, puis de l'importer sur les autres équipements.
Export
Se connecter avec un téléphone, une tablette ou un PC sur le hotspot Wifi de l'équipement (robot ou manageur).
Vous trouverez le mot de passe du réseau Wifi sur la fiche mémo fournie avec l'équipement' (si le mot de passe n'a pas été modifié par vos soins).
Une fois connecté au Wifi, ouvrir un navigateur Web et aller à l'adresse : http://10.46.0.254 Se connecter avec le login et mot de passe indiqué sur la fiche mémo fournie avec le robot (si le login ou le mot de passe n'ont pas été modifiés par vos soins).
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite.Aller dans la partie
Import / Exporten cliquant sur le bouton dédié.Cliquer sur le bouton
Exportpour télécharger le fichier de configuration (une confirmation peux vous être demandée par votre navigateur).
Import
Une fois l'export téléchargé, se connecter avec le même matériel (téléphone, une tablette ou un PC) sur le hotspot Wifi des autres équipements (robot et manageur). Vous trouverez le mot de passe du réseau Wifi sur la fiche mémo fournie avec l'équipement (si le mot de passe n'a pas été modifié par vos soins).
Une fois connecté au Wifi, ouvrir un navigateur Web et aller à l'adresse : http://10.46.0.254 Se connecter avec le login et mot de passe indiqué sur la fiche mémo fournie avec le robot (si le login ou le mot de passe n'ont pas été modifiés par vos soins).
Aller dans la partie
Configurationen cliquant sur le bouton en bas à droite.Aller dans la partie
Import / Exporten cliquant sur le bouton dédié.Cliquer sur le bouton
Importet sélectionné le fichier précédemment téléchargé.Dans le cas des robots, il peut vous être demandé de sélectionner la station de charge par défaut du robot.
Rajouter des contraintes sur les missions des boutons
Description
Dans certains cas, il peut être utile de conditionner l'éxécution d'une mission à un élément physiqeue (présence d'une caisse à un endroit donnée, machine dans un certain état, ...).
Notre solution permet de rajouter des contraintes dans les étapes d'une mission pour n'autoriser le robot à continuer sa mission que dans certains cas.
Prérequis
Un ou plusieurs contrôleurs LoRa doivent être configurés sur la solution.
Les contraintes seront liées à l'état d'un des contacts secs du contrôleur LoRa.
Configuration
Lors de la configuration d'un bouton, un bouton avec un cadenas est présent sur les étapes de la mission.
Pour ajouter une contrainte sur l'étape, cliquer sur ce bouton. Vous aurez alors la possibilité de créer une ou plusieurs nouvelles contraintes.
Pour configurer une contrainte, vous devez :
Sélectionner le contrôleur LoRa
Sélectionner le contact lié à cette contrainte
Indiquer si ce contact doit être dans l'état
OnouOffpour que le robot éxécute l'étape.
Mon robot ne bouge plus, pourquoi ?
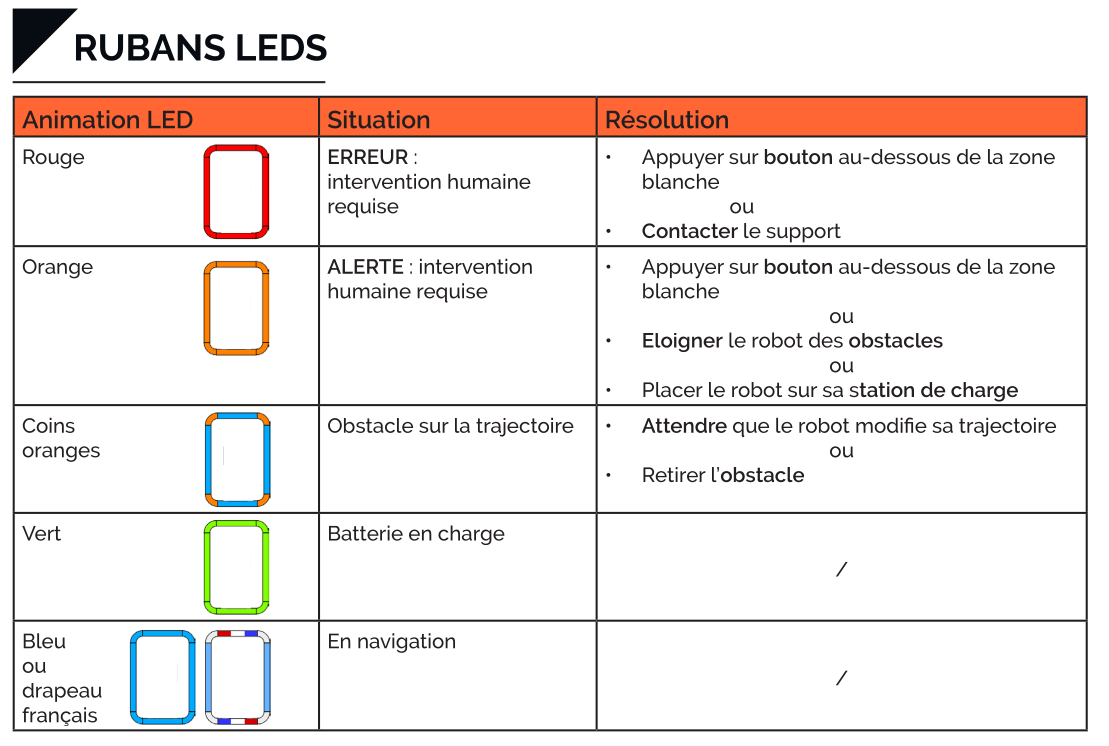
Dans certaines situations, le robot peut ne plus bouger ou s'arrêter pendant un déplacement, pour déterminer la cause, regarder les couleurs des LED sur le robot :
Les LED sont rouges ; le robot est en IHR (Intervention humaine requise), l'écran du robot indique la procédure pour débloquer le robot.
Les angles des LED sont oranges pendant un déplacement : les capteurs du robot détectent un obstacle bloquant le déplacement du robot.
Toutes les leds sont éteintes ; le robot n'a plus de batterie ; déplacer le robot sur sa station de charge pour qu'il se recharge
Si les LED ne sont pas dans l'un des états ci-dessus,
Vérifier qu'un ordre de déplacement est bien demandé au robot.
Le robot ne parvient pas à trouver un chemin pour se déplacer jusqu'à sa destination ;
Libérer l'espace autour du robot ou le déplacer dans une zone libre.
Vérifier que la destination enregistrée sur la carte n'est pas trop proche d'un mur ou d'un obstacle.
Mon robot saccade par endroit, que faire ?
Description
Dans certaines situations, on peut avoir l'impression que le robot évite des "fantômes" ; les angles des leds s'allument en orange et le robot contourne une zone apparemment vide.
Ce comportement est généralement dû à la détection d'un faux positif au niveau des caméras 3D et/ou des capteurs ultrasons.
Configuration
Pour contourner ce problème, il est nécessaire de créer une zone paramétrable sur la carte à l'endroit où le robot a ce comportement.
Une fois la zone créée, vous pouvez :
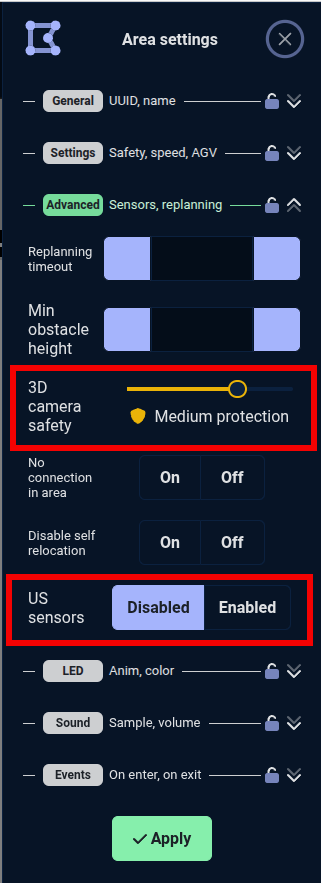
Diminuer la sensibilité des caméras et ainsi diminuer les faux positifs.
Désactiver les capteurs ultrasons. Attention ! Les capteurs ultrasons sont les seuls capteurs du robot à pouvoir détecter les vitres. Ces capteurs ne doivent pas être désactivés à proximité de portes ou cloisons vitrées.
Mon robot est perdu, que faire ?
Description
Dans certaines situations, le robot peut se perdre (il pense être à un endroit par rapport à sa carte mais est physiquement à un autre endroit) ou penser qu'il est perdu.
Le robot peut se perdre généralement dans un environnement très changeant où le robot n'a plus aucun point de repère fiable par rapport à sa carte.
Il peut penser être perdu si une personne le déplace dans une zone interdite.
Relocalisation
Devant le robot, maintener le bouton freewheel enfoncé ; l'écran affichera la carte du site avec la position du robot.
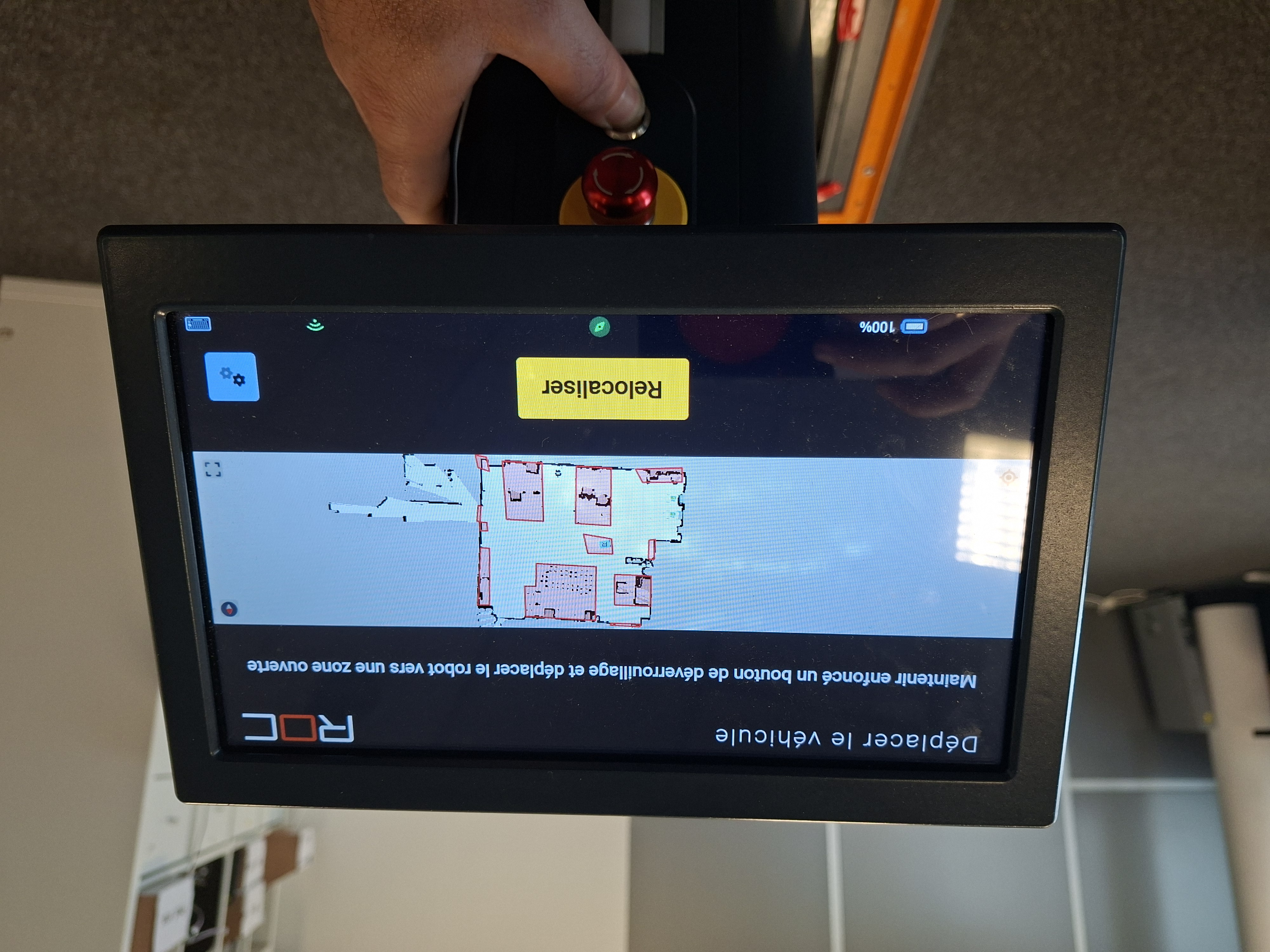
Si la position du robot sur la carte correspond à la position du robot en réalité ; le robot n'est pas perdu, déplacé le dans une zone dégagé en dehors d'une zone interdite.
Si la position du robot sur la carte ne correspond pas à la position du robot en réalité ; le robot est perdu et il faut le relocaliser.
Pour relocaliser le robot, déplacé le devant un marqueur (station de charge par exemple). Une fois le robot à l'arrêt devant le marqueur, celui-ci va automatiquement se relocaliser et reprendre sa mission.
Configuration
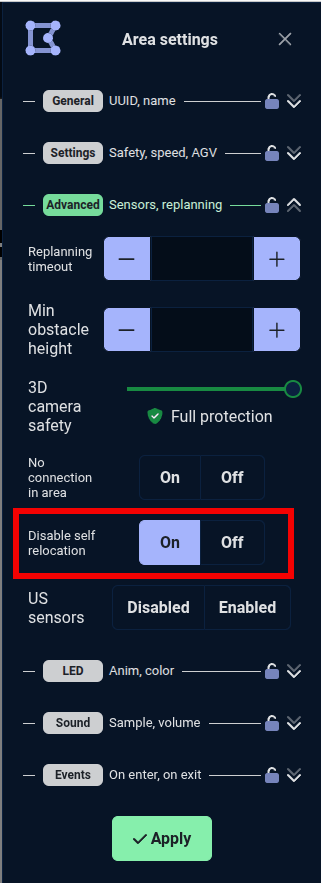
Si le robot a tendance à se perdre de manière répété dans une zone particulière, il est possible de créer une zone paramétrable dans laquelle on va interdire au robot de se relocaliser dynamiquement ; le robot évaluera sa position en fonction des ses mouvements sans essayer de se relocaliser par rapport à sa carte.
Créer une zone paramétrable
Mettre l'option
Disable self relocationàON
Mon robot a du mal à rentrer dans une zone, que faire ?
Description
Dans certains cas, le robot peut rencontrer des difficultés pour prendre un virage étroit ou pour rentrer dans une salle par exemple.
Dans ce cas, il est possible de "forcer" le chemin qui sera pris par le robot pour lui faciliter le passage.
Configuration
On peut "forcer" le chemin qui sera pris par le robot pour lui faciliter le passage en rajoutant des zones interdites.
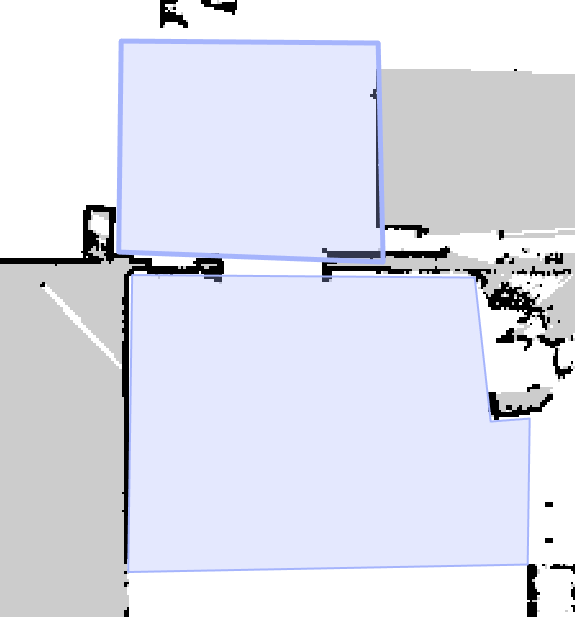
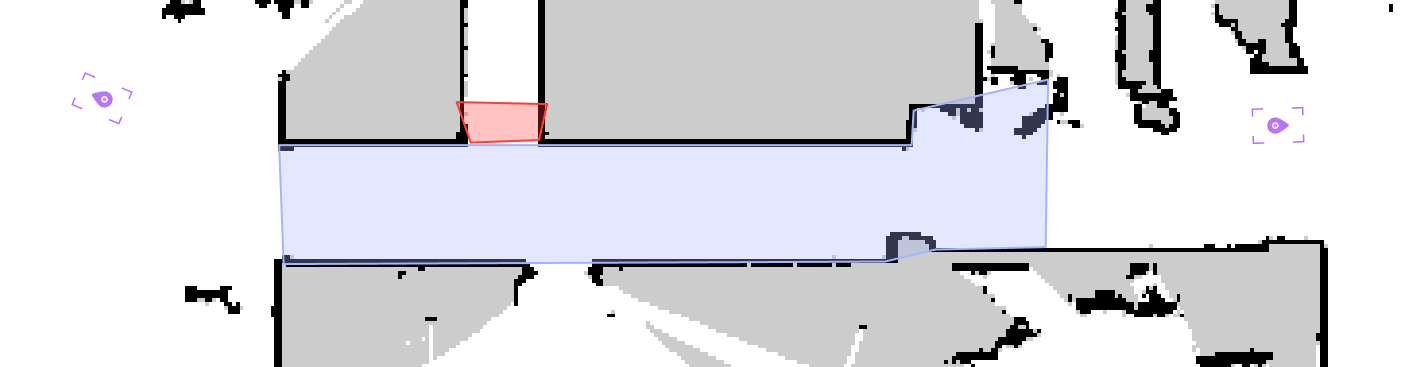
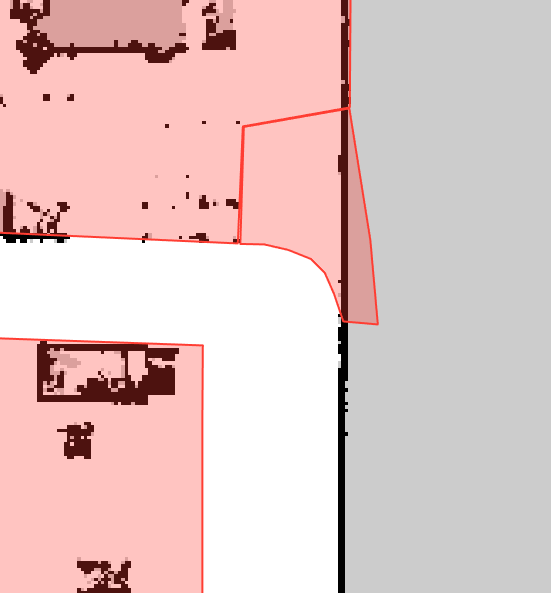
Virages
Pour "forcer" le robot à mieux prendre un virage, l'ajout d'une zone interdite comme ci-dessous peut être utile :
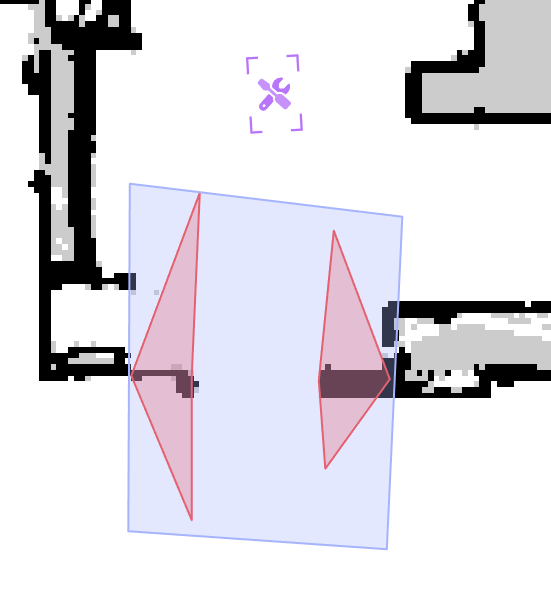
Portes
Pour "forcer" le robot à mieux passer une porte, l'ajout de 2 zones interdites comme ci-dessous peut être utile :
Routes à sens unique
Description
Dans certains sites, des règles de circulation sont mises en place (comme des passages à sens unique) et doivent s'appliquer également aux AIVs.
Notre solution permet de configurer ces routes sur la carte du robot et ainsi appliquer les règles de circulation au robot.
Attention ; les routes ne peuvent pas être configurées que sur une partie de la carte ; si une route est nécessaire sur une partie de la carte, toute la carte doit être constituée de routes.
Configuration
Se référer à la documentation Noeme, section Routes de circulations.
Ajouter un élément ayant un marqueur identique déjà présent dans la carte
Description
Les marqueurs sont utilisés pour plusieurs cas :
Localisation précise pour le positionnement du robot (station de charge, station de picking, ...).
Relocalisation automatique du robot sur l'appui du bouton freewheel.
Il est possible d'utiliser plusieurs marqueurs ayant le même code sur un même site.
La problématique est que lors de l'ajout du deuxième marqueur, si vous déplacez le robot à l'aide du bouton freewheel, le robot va se relocaliser sur le nouveau marqueur pensant être devant le marqueur déjà présent sur la carte.
Astuce
Le moyen le plus simple d'ajouter un marqueur ayant le même code qu'un autre marqueur déjà présent sur le site est de :
Masquer le nouveau marqueur à l'aide d'une feuille ou autre.
Déplacer le robot à l'endroit souhaité.
Retirer la feuille ou autre pour rendre le marqueur visible.
Ajouter ce nouveau marqueur dans la carte.